
Nun nehme ich die vorhergehenden Artikel und stelle daraus ein Barometer zusammen.
Aus diesen Artikeln ist die Schaltung und die Software entstanden.
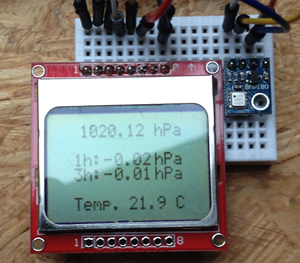
Mit dem BMP180 wird der Luftdruck und die Temperatur jede Minute 1 x gemessen und über 5 Werte gemittelt. Dadurch bekomme ich eine relativ stabile 2. Kommastelle hin und kann den aktuellen Wert und den alten Wert später mit 2 Kommastellen vergleichen.
Der Luftdruck wird im EEPROM abgelegt und mit dem Luftdruck vor einer Stunde verglichen.
Die Differenz wird zusätzlich ausgegeben.
Da der Wert als Long (4 Byte) abgelegt wird, können 1024 / 4 = 256 Werte verglichen werden, sodass ich auch mit dem Wert vor 3 Stunden (180 Minuten) vergleichen kann.
Die Daten werden auf dem Nokia 5110 Display ausgegeben.
Hier wurde noch die Funktion LcdClearLine(line) hinzugefügt.
Zwischen dem Messungen wird der Arduino schlafen gelegt für 59,9x Sekunden um Strom zu sparen. Das wird später auf dem Steckbrett passieren um auch den Stromverbrauch der Arduino Uno Peripherie Geräte einzusparen.
Der Stromverbrauch.
Die endgültige Schaltung wird deutlich weniger als 1mA im Schnitt verbrauchen an 5V und ist damit für einen Akkubetrieb geeignet.
Das LCD Display vom Nokia 5110 benötigt ca. 160 uA ohne Beleuchtung.
Der BMP180 Luftdrucksensor benötigt ca 40uA.
Der Arduino auf dem Steckbrett bei 200ms Betrieb pro Minute benötigt im Schnitt ca. 120uA.
In der Summe sind das 320uA Stromverbrauch oder 1,6 mW an 5V.
Ein 5V Akku mit 2000mAh ergibt somit 6250 Stunden, das sind 260 Tage oder 8,6 Monate.
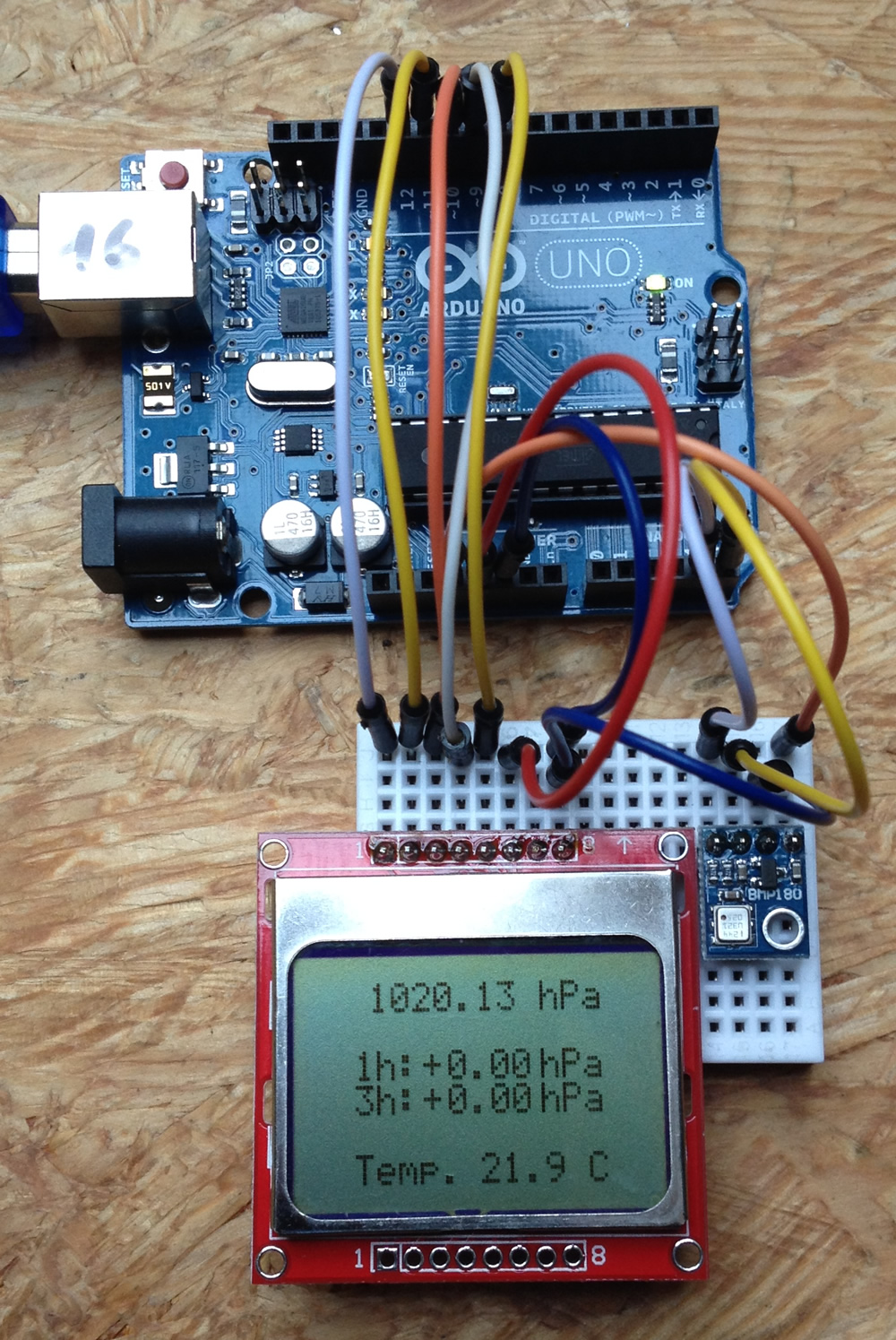
Die Schaltung.
Hier wird vorerst noch der Arduino Uno verwendet, dann das Nokia 5110 Display und der BMP-180 Sensor. Die Verkabelung wird identisch zu den vorhergehenden Artikeln vorgenommen.
Die Software.
Hier sind die vorherigen Artikel zusammen geführt zu einem Programm und etwas ergänzt und angepasst worden.
// Luftdruck Ausgabe aktuell
// Luftdruckdifferenz wird mit 1 und 3 Stunden vorher (im EEPROM) verglichen und ausgegeben
// Temperatur Ausgabe aktuell
//
// Bauteile:
// LCD Display vom Nokia 5110
// BMP180 Luftdrucksensor
// Arduino Uno
//
// Matthias Busse Version 1.0 vom 21.9.2014
#include < Wire.h>
#include < avr/sleep.h>
#include < EEPROM.h>
// EEPROM Variablen
int eepromAdresse=0, eepromMax=1023; // 1024 EEPROM Speicherplätze, 0-1023
int eepromOldAdr, eepromDif1=60, eepromDif3=180; // 60/180 Speicherplätze (Minuten) zurück vergleichen
// BMP180 Variablen
#define I2C_ADDRESS 0x77
const unsigned char oversampling_setting = 3; //oversamplig: 0 ungenau (13ms) ... 3 genau (34ms)
const unsigned char pressure_waittime[4] = { 5, 8, 14, 26 }; // lt. Datenblatt BMP-180
int ac1, ac2, ac3, b1, b2, mb, mc, md;
unsigned int ac4, ac5, ac6;
int temp = 20, temp_mittel=200, test=0;
long druck = 1013, druck_mittel=101300;
float t, temp_offset=0.0, d, dAlt, dDiff, druck_offset=2.0;
int zeitabgl=0, mitteln=5;
char tstring[5], dstring[7];
// Power Down Variablen
volatile int sleepcounter = 0; // Schlafzyklen mitzählen
// Display Variablen
static const byte ASCII[][5] = {// ASCII Tabelle mit Fonts
{0x00, 0x00, 0x00, 0x00, 0x00} // 20
,{0x00, 0x00, 0x5f, 0x00, 0x00} // 21 !
,{0x00, 0x07, 0x00, 0x07, 0x00} // 22 "
,{0x14, 0x7f, 0x14, 0x7f, 0x14} // 23 #
,{0x24, 0x2a, 0x7f, 0x2a, 0x12} // 24 $
,{0x23, 0x13, 0x08, 0x64, 0x62} // 25 %
,{0x36, 0x49, 0x55, 0x22, 0x50} // 26 &
,{0x00, 0x05, 0x03, 0x00, 0x00} // 27 '
,{0x00, 0x1c, 0x22, 0x41, 0x00} // 28 (
,{0x00, 0x41, 0x22, 0x1c, 0x00} // 29 )
,{0x14, 0x08, 0x3e, 0x08, 0x14} // 2a *
,{0x08, 0x08, 0x3e, 0x08, 0x08} // 2b +
,{0x00, 0x50, 0x30, 0x00, 0x00} // 2c ,
,{0x08, 0x08, 0x08, 0x08, 0x08} // 2d -
,{0x00, 0x60, 0x60, 0x00, 0x00} // 2e .
,{0x20, 0x10, 0x08, 0x04, 0x02} // 2f /
,{0x3e, 0x51, 0x49, 0x45, 0x3e} // 30 0
,{0x00, 0x42, 0x7f, 0x40, 0x00} // 31 1
,{0x42, 0x61, 0x51, 0x49, 0x46} // 32 2
,{0x21, 0x41, 0x45, 0x4b, 0x31} // 33 3
,{0x18, 0x14, 0x12, 0x7f, 0x10} // 34 4
,{0x27, 0x45, 0x45, 0x45, 0x39} // 35 5
,{0x3c, 0x4a, 0x49, 0x49, 0x30} // 36 6
,{0x01, 0x71, 0x09, 0x05, 0x03} // 37 7
,{0x36, 0x49, 0x49, 0x49, 0x36} // 38 8
,{0x06, 0x49, 0x49, 0x29, 0x1e} // 39 9
,{0x00, 0x36, 0x36, 0x00, 0x00} // 3a :
,{0x00, 0x56, 0x36, 0x00, 0x00} // 3b ;
,{0x08, 0x14, 0x22, 0x41, 0x00} // 3c <
,{0x14, 0x14, 0x14, 0x14, 0x14} // 3d =
,{0x00, 0x41, 0x22, 0x14, 0x08} // 3e >
,{0x02, 0x01, 0x51, 0x09, 0x06} // 3f ?
,{0x32, 0x49, 0x79, 0x41, 0x3e} // 40 @
,{0x7e, 0x11, 0x11, 0x11, 0x7e} // 41 A
,{0x7f, 0x49, 0x49, 0x49, 0x36} // 42 B
,{0x3e, 0x41, 0x41, 0x41, 0x22} // 43 C
,{0x7f, 0x41, 0x41, 0x22, 0x1c} // 44 D
,{0x7f, 0x49, 0x49, 0x49, 0x41} // 45 E
,{0x7f, 0x09, 0x09, 0x09, 0x01} // 46 F
,{0x3e, 0x41, 0x49, 0x49, 0x7a} // 47 G
,{0x7f, 0x08, 0x08, 0x08, 0x7f} // 48 H
,{0x00, 0x41, 0x7f, 0x41, 0x00} // 49 I
,{0x20, 0x40, 0x41, 0x3f, 0x01} // 4a J
,{0x7f, 0x08, 0x14, 0x22, 0x41} // 4b K
,{0x7f, 0x40, 0x40, 0x40, 0x40} // 4c L
,{0x7f, 0x02, 0x0c, 0x02, 0x7f} // 4d M
,{0x7f, 0x04, 0x08, 0x10, 0x7f} // 4e N
,{0x3e, 0x41, 0x41, 0x41, 0x3e} // 4f O
,{0x7f, 0x09, 0x09, 0x09, 0x06} // 50 P
,{0x3e, 0x41, 0x51, 0x21, 0x5e} // 51 Q
,{0x7f, 0x09, 0x19, 0x29, 0x46} // 52 R
,{0x46, 0x49, 0x49, 0x49, 0x31} // 53 S
,{0x01, 0x01, 0x7f, 0x01, 0x01} // 54 T
,{0x3f, 0x40, 0x40, 0x40, 0x3f} // 55 U
,{0x1f, 0x20, 0x40, 0x20, 0x1f} // 56 V
,{0x3f, 0x40, 0x38, 0x40, 0x3f} // 57 W
,{0x63, 0x14, 0x08, 0x14, 0x63} // 58 X
,{0x07, 0x08, 0x70, 0x08, 0x07} // 59 Y
,{0x61, 0x51, 0x49, 0x45, 0x43} // 5a Z
,{0x00, 0x7f, 0x41, 0x41, 0x00} // 5b [
,{0x02, 0x04, 0x08, 0x10, 0x20} // 5c ¥
,{0x00, 0x41, 0x41, 0x7f, 0x00} // 5d ]
,{0x04, 0x02, 0x01, 0x02, 0x04} // 5e ^
,{0x40, 0x40, 0x40, 0x40, 0x40} // 5f _
,{0x00, 0x01, 0x02, 0x04, 0x00} // 60 `
,{0x20, 0x54, 0x54, 0x54, 0x78} // 61 a
,{0x7f, 0x48, 0x44, 0x44, 0x38} // 62 b
,{0x38, 0x44, 0x44, 0x44, 0x20} // 63 c
,{0x38, 0x44, 0x44, 0x48, 0x7f} // 64 d
,{0x38, 0x54, 0x54, 0x54, 0x18} // 65 e
,{0x08, 0x7e, 0x09, 0x01, 0x02} // 66 f
,{0x0c, 0x52, 0x52, 0x52, 0x3e} // 67 g
,{0x7f, 0x08, 0x04, 0x04, 0x78} // 68 h
,{0x00, 0x44, 0x7d, 0x40, 0x00} // 69 i
,{0x20, 0x40, 0x44, 0x3d, 0x00} // 6a j
,{0x7f, 0x10, 0x28, 0x44, 0x00} // 6b k
,{0x00, 0x41, 0x7f, 0x40, 0x00} // 6c l
,{0x7c, 0x04, 0x18, 0x04, 0x78} // 6d m
,{0x7c, 0x08, 0x04, 0x04, 0x78} // 6e n
,{0x38, 0x44, 0x44, 0x44, 0x38} // 6f o
,{0x7c, 0x14, 0x14, 0x14, 0x08} // 70 p
,{0x08, 0x14, 0x14, 0x18, 0x7c} // 71 q
,{0x7c, 0x08, 0x04, 0x04, 0x08} // 72 r
,{0x48, 0x54, 0x54, 0x54, 0x20} // 73 s
,{0x04, 0x3f, 0x44, 0x40, 0x20} // 74 t
,{0x3c, 0x40, 0x40, 0x20, 0x7c} // 75 u
,{0x1c, 0x20, 0x40, 0x20, 0x1c} // 76 v
,{0x3c, 0x40, 0x30, 0x40, 0x3c} // 77 w
,{0x44, 0x28, 0x10, 0x28, 0x44} // 78 x
,{0x0c, 0x50, 0x50, 0x50, 0x3c} // 79 y
,{0x44, 0x64, 0x54, 0x4c, 0x44} // 7a z
,{0x00, 0x08, 0x36, 0x41, 0x00} // 7b {
,{0x00, 0x00, 0x7f, 0x00, 0x00} // 7c |
,{0x00, 0x41, 0x36, 0x08, 0x00} // 7d }
,{0x10, 0x08, 0x08, 0x10, 0x08} // 7e ←
,{0x78, 0x46, 0x41, 0x46, 0x78} // 7f →
};
#define RST 12
#define CE 11
#define DC 10
#define DIN 9
#define CLK 8
void setup(){
for(int i=0; i < eepromMax; i+=4) // EEPROM alles zu null
eepromWriteLong(0,i);
// Power Down Einstellungen
watchdogOn(); // Watchdog timer einschalten.
ADCSRA = ADCSRA & B01111111; // ADC abschalten, ADEN bit7 zu 0
ACSR = B10000000; // Analogen Comparator abschalten, ACD bit7 zu 1
DIDR0 = DIDR0 | B00111111; // Digitale Eingangspuffer ausschalten, analoge Eingangs Pins 0-5 auf 1
Wire.begin(); // BMP180 Einstellungen
bmp180_get_cal_data();
bmp180_read_temperature_and_pressure(&temp_mittel,&druck_mittel); // erstmal Mittelwerte lesen
pinMode(RST, OUTPUT); // 5110 Display Einstellungen
pinMode(CE, OUTPUT);
pinMode(DC, OUTPUT);
pinMode(DIN, OUTPUT);
pinMode(CLK, OUTPUT);
digitalWrite(RST, LOW);
digitalWrite(RST, HIGH);
LcdWriteCmd(0x21); // LCD extended commands
LcdWriteCmd(0xB8); // set LCD Vop (contrast)
LcdWriteCmd(0x04); // set temp coefficent
LcdWriteCmd(0x14); // LCD bias mode 1:40
LcdWriteCmd(0x20); // LCD basic commands
LcdWriteCmd(0x0C); // LCD normal video
LcdClearScreen();
}
void loop() {
bmp180_read_temperature_and_pressure(&temp, &druck); // dauert ca. 51ms
temp_mittel = ((temp_mittel * (mitteln-1)) + temp) / mitteln;
druck_mittel = ((druck_mittel * (mitteln-1)) + druck) / mitteln;
t=((float)temp_mittel/10.0)+temp_offset;
d=((float)druck_mittel/100.0)+druck_offset;
LcdClearLine(0);
LcdXY(12,0);
LcdWriteString(dtostrf(d,7,2,dstring));
LcdXY(60,0);
LcdWriteString("hPa");
eepromWriteLong(d*100, eepromAdresse); // Druck im EEPROM abspeichern mit 2 Kommastellen (*100 long)
eepromOldAdr=eepromAdresse -(eepromDif1*4); // Diff 1h zurück gehen
if(eepromOldAdr < 0) eepromOldAdr = eepromMax + 1 + eepromOldAdr; // überlauf
dAlt=(float)eepromReadLong(eepromOldAdr)/100.0; // alten Wert lesen
dDiff=d-dAlt; // Differenz bilden
LcdClearLine(2);
LcdXY(8,2); // Ausgeben
LcdWriteString("1h:");
if(dAlt > 800) {
LcdXY(27,2);
if(dDiff < 0.0) LcdWriteString("-");
else LcdWriteString("+");
if(dDiff < 0.0) dDiff=dDiff*-1.0; // Absolutwert
LcdXY(34,2);
LcdWriteString(dtostrf(dDiff,4,2,dstring));
}
LcdXY(60,2);
LcdWriteString("hPa");
eepromOldAdr=eepromAdresse -(eepromDif3*4); // Diff 3h zurück gehen
if(eepromOldAdr < 0) eepromOldAdr = eepromMax + 1 + eepromOldAdr; // überlauf
dAlt=(float)eepromReadLong(eepromOldAdr)/100.0; // alten Wert lesen
dDiff=d-dAlt; // Differenz bilden
LcdClearLine(3);
LcdXY(8,3); // Ausgeben
LcdWriteString("3h:");
if(dAlt > 800) {
LcdXY(27,3);
if(dDiff < 0.0) LcdWriteString("-");
else LcdWriteString("+");
if(dDiff < 0.0) dDiff=dDiff*-1.0; // Absolutwert
LcdXY(34,3);
LcdWriteString(dtostrf(dDiff,4,2,dstring));
}
LcdXY(60,3);
LcdWriteString("hPa");
LcdClearLine(5); // Temperatur ausgeben
LcdXY(8,5);
LcdWriteString("Temp. ");
LcdXY(43,5);
LcdWriteString(dtostrf(t,4,1,tstring));
LcdXY(73,5);
LcdWriteString("C");
eepromAdresse += 4;
if(eepromAdresse > eepromMax) eepromAdresse=0;
pwrDown(54); // ATmega328 fährt runter für den Rest der 60 Sekunden
}
void eepromWriteLong(long lo, int adr) {
// long Wert in das EEPROM schreiben
// Eingabe : adr Speicherplatz
// Eingabe : lo Zahl, Wertebereich -2.147.483.648 bis 2.147.483.647
//
// Matthias Busse 23.5.2014 Version 1.0
byte by;
for(int i=0;i < 4;i++) {
by = (lo >> ((3-i)*8)) & 0x000000ff;
EEPROM.write(adr+i, by);
}
} // eepromWriteLong
long eepromReadLong(int adr) {
// long int Wert aus 4 Byte EEPROM lesen
// Eingabe : adr bis adr+3
// Ausgabe : long Wert
//
// Matthias Busse 23.5.2014 Version 1.0
long lo=0;
for(int i=0;i < 3;i++){
lo += EEPROM.read(adr+i);
lo = lo << 8;
}
lo += EEPROM.read(adr+3);
return lo;
} // eepromReadLong
void LcdWriteString(char *characters) {
// String ausgeben
while(*characters) LcdWriteCharacter(*characters++);
}
void LcdWriteCharacter(char character) {
// ASCII Zeichen ausgeben aus der Tabelle oben
for(int i=0; i < 5; i++) LcdWriteData(ASCII[character - 0x20][i]);
LcdWriteData(0x00);
}
void LcdWriteCmd(byte cmd){
// Kommando an Display senden
digitalWrite(DC, LOW); //DC pin is low for commands
digitalWrite(CE, LOW);
shiftOut(DIN, CLK, MSBFIRST, cmd); //transmit serial data
digitalWrite(CE, HIGH);
}
void LcdWriteData(byte cmd){
// Daten an Display senden
digitalWrite(DC, HIGH); //DC pin is high for data
digitalWrite(CE, LOW);
shiftOut(DIN, CLK, MSBFIRST, cmd); //transmit serial data
digitalWrite(CE, HIGH);
}
void LcdClearScreen() {
// Bildschirm leeren
for(int i=0; i < 504; i++)
LcdWriteData(0x00);
}
void LcdClearLine(int line) {
// Zeile leeren
LcdXY(0, line);
for(int i=0; i < 84; i++)
LcdWriteData(0x00);
}
void LcdXY(int x, int y) {
// an X / Y Position gehen
LcdWriteCmd(0x80|x); // Spalte
LcdWriteCmd(0x40|y); // Zeile
}
void bmp180_read_temperature_and_pressure(int* temp, long* druck) {
int ut= bmp180_read_ut();
long up = bmp180_read_up();
long x1, x2, x3, b3, b5, b6, p;
unsigned long b4, b7;
x1 = ((long)ut - ac6) * ac5 >> 15; //Temperatur berechnen
x2 = ((long) mc << 11) / (x1 + md);
b5 = x1 + x2;
*temp = (b5 + 8) >> 4;
b6 = b5 - 4000; //Druck berechnen
x1 = (b2 * (b6 * b6 >> 12)) >> 11;
x2 = ac2 * b6 >> 11;
x3 = x1 + x2;
if (oversampling_setting == 3) b3 = ((int32_t) ac1 * 4 + x3 + 2) << 1;
if (oversampling_setting == 2) b3 = ((int32_t) ac1 * 4 + x3 + 2);
if (oversampling_setting == 1) b3 = ((int32_t) ac1 * 4 + x3 + 2) >> 1;
if (oversampling_setting == 0) b3 = ((int32_t) ac1 * 4 + x3 + 2) >> 2;
x1 = ac3 * b6 >> 13;
x2 = (b1 * (b6 * b6 >> 12)) >> 16;
x3 = ((x1 + x2) + 2) >> 2;
b4 = (ac4 * (uint32_t) (x3 + 32768)) >> 15;
b7 = ((uint32_t) up - b3) * (50000 >> oversampling_setting);
p = b7 < 0x80000000 ? (b7 * 2) / b4 : (b7 / b4) * 2;
x1 = (p >> 8) * (p >> 8);
x1 = (x1 * 3038) >> 16;
x2 = (-7357 * p) >> 16;
*druck = p + ((x1 + x2 + 3791) >> 4);
}
unsigned int bmp180_read_ut() {
write_register(0xf4,0x2e);
delay(5); //mehr als 4.5 ms
return read_int_register(0xf6);
}
void bmp180_get_cal_data() {
ac1 = read_int_register(0xAA);
ac2 = read_int_register(0xAC);
ac3 = read_int_register(0xAE);
ac4 = read_int_register(0xB0);
ac5 = read_int_register(0xB2);
ac6 = read_int_register(0xB4);
b1 = read_int_register(0xB6);
b2 = read_int_register(0xB8);
mb = read_int_register(0xBA);
mc = read_int_register(0xBC);
md = read_int_register(0xBE);
}
long bmp180_read_up() {
write_register(0xf4,0x34+(oversampling_setting<<6));
delay(pressure_waittime[oversampling_setting]);
unsigned char msb, lsb, xlsb;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(0xf6);
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 3);
while(!Wire.available()) {} // warten
msb = Wire.read();
while(!Wire.available()) {} // warten
lsb |= Wire.read();
while(!Wire.available()) {} // warten
xlsb |= Wire.read();
return (((long)msb<<16) | ((long)lsb<<8) | ((long)xlsb)) >>(8-oversampling_setting);
}
void write_register(unsigned char r, unsigned char v) {
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r);
Wire.write(v);
Wire.endTransmission();
}
char read_register(unsigned char r) {
unsigned char v;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r);
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 1);
while(!Wire.available()) {} // warten
v = Wire.read();
return v;
}
int read_int_register(unsigned char r) {
unsigned char msb, lsb;
Wire.beginTransmission(I2C_ADDRESS);
Wire.write(r);
Wire.endTransmission();
Wire.requestFrom(I2C_ADDRESS, 2);
while(!Wire.available()) {} // warten
msb = Wire.read();
while(!Wire.available()) {} // warten
lsb = Wire.read();
return (((int)msb<<8) | ((int)lsb));
}
void pwrDown(int sekunden) {
set_sleep_mode(SLEEP_MODE_PWR_DOWN); // den tiefsten Schlaf auswählen PWR_DOWN
for(int i=0; i < sekunden; i++) {
sleep_enable(); // sleep mode einschalten
sleep_mode(); // in den sleep mode gehen
sleep_disable(); // sleep mode ausschalten nach dem Erwachen
} // for
}
void watchdogOn() {
MCUSR = MCUSR & B11110111; // Reset flag ausschalten, WDRF bit3 vom MCUSR.
WDTCSR = WDTCSR | B00011000; // Bit 3+4 um danach den Prescaler setzen zu können
WDTCSR = B00000110; // Watchdog Prescaler auf 128k setzen > ergibt ca. 1 Sekunde
WDTCSR = WDTCSR | B01000000; // Watchdog Interrupt einschalten
MCUSR = MCUSR & B11110111;
}
ISR(WDT_vect) {
sleepcounter ++; // Schlafzyklen mitzählen
}
Eine Anmerkung:
Bei einem schnellen Luftdruckabfall von ca. 1 hPa pro Stunde oder mehr ist mit starkem Wind zu rechnen. Diese Angabe ist auf Booten sehr hilfreich für die Wetterprognose. Deshalb wird hier dieser Wert zusätzlich ermittelt und ausgegeben.
Es wird auch noch die 3 Stunden Tendenz angeteigt. Das ist aber nur mit einem 1024 Byte grossem EEPROM noch möglich.
Auch in diesem Quelltext musste ich wieder in die #include Zeilen ein zusätzliches Leerzeichen hinter dem < einfügen. Das muss in der Arduino IDE wieder entfernt werden.
Also #include < Wire.h> wird zu #include <Wire.h> usw.
von Matthias Busse
Moin! Bin gerade auf deine Seite gestoßen. Ich versuche schon seit Tagen auf diesem Display in Verbindung mit mehreren DS18B20 eine Kommastelle darzustellen.
In Deinem Code finde ich nicht die ausschlaggebende Stelle. Könntest Du mir auf die
Srpünge helfen? Wär echt nett wenn Du mir nen Tip geben könntest!
Vielen Dank schon mal!
Gruß, Rico
Hallo Rico,
versuch mal den Wert mit mit Serial.println(grad); auf der Konsole auszugeben.
Wenn dort auch keine Kommastelle raus kommt hast Du vielleicht int oder long im Programm verwendet?
Ansonsten gibt es eine gute Graphische Library für das Display unter:
http://www.henningkarlsen.com/electronics/library.php?id=47
Damit kannst Du float formatiert ausgeben mit printNumF(…)
Grüße,
Matthias
Hello
Very important to me .Still compile error:
————————————————————-
#include
^
compilation terminated.
exit status 1
Błąd kompilacji.
———————————————————-
Arduino 1.6.7
Please help.
Thank you very much
Hello,
after #include remover the space between < and Wire.h>
Compilation OK!.
Thank you very much.
What amendments should be used in your code when you use the Pro Mini 3.3V, 8MHz?.
Regards.
hy
if i use bmp280 what should i change?
i connect vcc to 3,3 V, gnd , dsa and scl like in your photo
but the display didn’t want to start, i don’t have nothing on my display
thanks
Hallo,
ich bin nicht so der Programmierer.
Gibt es eine Möglichkeit das Barometer an die Ortshöhe anzupassen?
Bei mir wären das 600 Meter.
Danke schon mal.
Gruß
Rolf
In 600m ist der Luftdruck ca. 69 Hektopascal niedriger als auf Meereshöhe.
Ansonsten such mal nach: internationale Höhenformel.
Grüße,
Matthias
Hallo!
Das hat mir gut gefallen, ich habe s auch gleich nach gebaut!
Das hat auch Tadellos funktioniert, bis nach ca. 1 Stund, die Anzeige verschwand.
Dachte erst, es ist das Display, oder der BMP, jedoch funktionieren an anderen Schaltungen einwandfrei!
Da es hier nur auf dem Tischlag, ich immer mal draufgeschaut habe, bin ich richtig ratlos!
Was könnte ich da noch machen?
Über etwas Hilfe würde ich mich freuen, vielen Dank im Vorraus
Bernd
Hallo!
Habe das Problem selber gefunden!
Leider war in so einem Kabel, in der Tülle, dann eine Unterbrechung!
Doofer Fehler!
Trotzdem Danke!