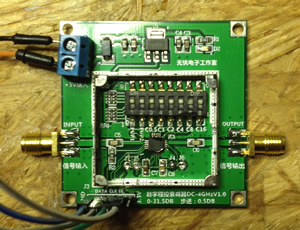
Ich habe die Attentuator (Dämpfungsglied) Platine aus China bekommen mit dem PE4302 Chip drauf.
Diese Platine soll seriell vom Arduino angesteuert werden. Die Dämpfung ist dann einstellbar bis zu einer Frequenz von 4GHz. Das funktioniert wenn man das Datenwort seriell überträgt mit Data und Clock und dann mit LE das Wort scharf schaltet.
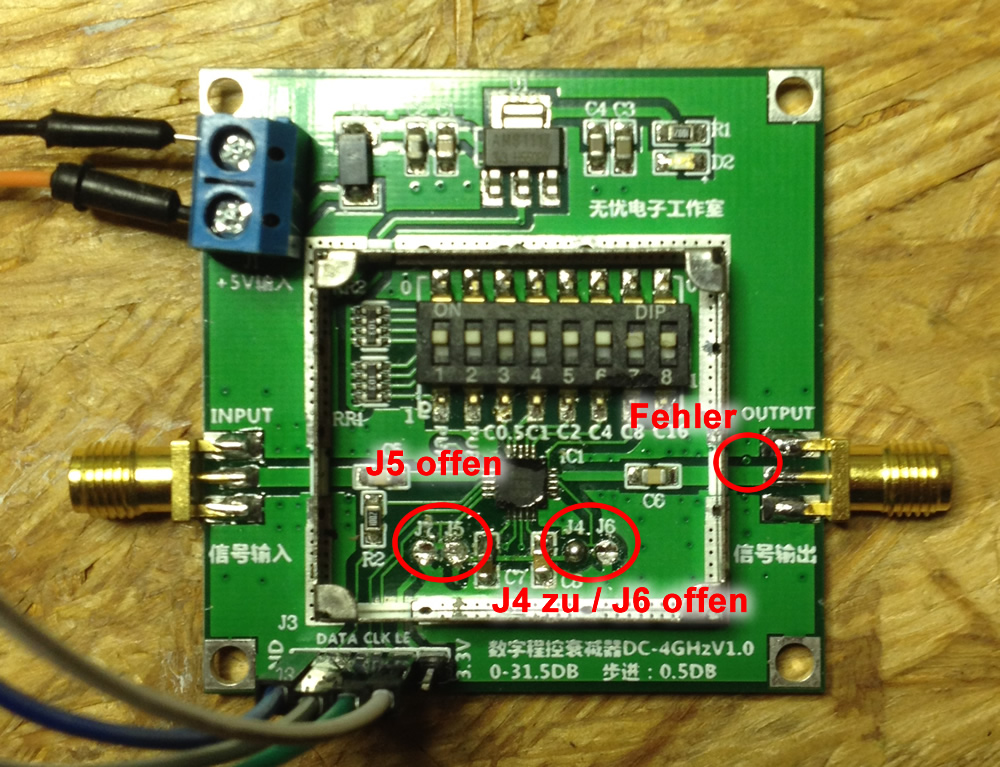
Doch zuerst ein Blick auf die gelieferte Platine. Da fallen gleich ein paar Fehler auf:
Am Ausgang in der Nähe des SMA Steckers ist eine Masse Durchkontaktierung direkt neben die Streifenleitung gesetzt worden. Da hat einer nicht aufgepasst.
Die Lötbrücke J5 ist gesetzt. Damit liegt LE direkt auf 3V und ist nicht ansprechbar. Diese Lötbrücke habe ich entfernt.
Die Lötbrücke J6 ist gesetzt. Damit ist P/S auf GND und somit auf den Parallelbetrieb eingestellt. Diese Lötbrücke habe ich entfernt. Für den Seriellen Betrieb habe ich die Lötbrücke J4 gesetzt und damit P/S auf 3V gelegt. Dann können die seriellen Daten akzeptiert werden.
Hier die Änderungen im Bild.
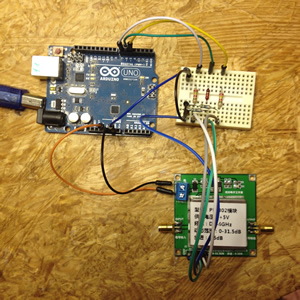
Dann wurde der Arduino Uno angeschlossen.
Die Spannungsversorgung des PE4302 Platine ist auf 5V ausgelegt und damit direkt am Arduino 5V Ausgang anschließbar.
Die Datenpegel des Uno Liegen bei 5V. Der PE4302 akzeptiert aber nur 3V. Hier wurden drei Spannungsteiler in den 3 Datenleitungen zwischengeschaltet jeweils mit 2,2 kOhm und 3,3k Ohm Widerständen um den PE4302 nicht zu beschädigen. Weiterlesen →
Gefällt mir:
Gefällt mir Wird geladen …