Der Servo Tester mit dem Timer IC NE555 und 2 Tasten für die rechts / links Drehung.

Die Erklärung: Weiterlesen

Der Servo Tester mit dem Timer IC NE555 und 2 Tasten für die rechts / links Drehung.
Die Erklärung: Weiterlesen
Der MAX4820 low side MOSFET Treiber für 8 Lastanschlüsse wird vorgestellt, aufgebaut und mit einen Microcontroller / Arduino angesteuert.
Verwendet wurden:
MAX4820 IC , Spannungsanschlussbrücke, LEDs, Breadboard, Steckbrücken.
Das Programm: Weiterlesen
Mit dem ULN280x IC können vom Microcontroller aus Geräte mit höheren Strömen und Spannungen angesteuert werden wie Relais, Motoren oder Lichter. Es werden 8 Eingänge zu 8 Ausgängen invertiert geschaltet. Ein High (5V) am Eingang schaltet den Ausgang durch (Low oder 0V). Es ist also ein Inverter mit einer großen Stromverstärkung.
Verwendet wurden:
ULN2803 IC, 3 LEDs mit Vorwiderständen, Breadboard und Steckbrücken, Spannungsanschluss & Brücke, Zwei Spannungsanzeigen aus diesem Video.
Das bistabile Relais HFD02/005-S-L2 wird vom Arduino angesteuert. Dazu werden zwei N-Kanal MOSFETs in der Schaltung eingesetzt und das Arduino Programm wird erklärt.
Das Bistabile Relais ist im vorherigen Video vorgestellt worden: Weiterlesen
Ich habe heute ein 500A Relais aus China bekommen, ausgepackt und gleich getestet. Es ist ab ca. 15 Euro incl. Versand zu haben.
Es ist ein 12V Relais, ist schlank aufgebaut und hat 4 Schraubanschlüsse.
2 x M5 für die Schaltspannung von 12V
2 x M8 mit Kupferschrauben für die 500A Schaltkontakte

Es ist 8,6 cm hoch und 6×8 cm breit mit einem Metallfuß zum anschrauben mit 2 x 7mm Langlöchern. Weiterlesen
Das Dämpfungsglied mit dem PE4302 Chip soll seriell einstellbar sein und vom PC aus angesprochen werden können.
Dazu nehme ich die Schaltung vom vorherigen Beitrag und erweitere die Arduino Software für die serielle Steuerung.
Diese seriellen Kommandos können im Seriellen Monitor des Arduino Programms eingegeben werden und werden dann zum Arduino geschickt, der entsprechende Aktionen auslöst.
Die Kommandos sind:
s : set attentuator. Examples: s1.5 | s0 | s 22.5 | s 31 | s 0.0
g : get actual attentuator value
d : device class Weiterlesen
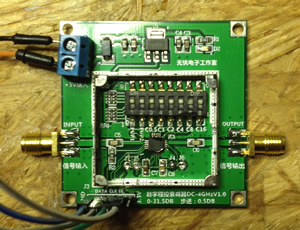
Ich habe die Attentuator (Dämpfungsglied) Platine aus China bekommen mit dem PE4302 Chip drauf.
Diese Platine soll seriell vom Arduino angesteuert werden. Die Dämpfung ist dann einstellbar bis zu einer Frequenz von 4GHz. Das funktioniert wenn man das Datenwort seriell überträgt mit Data und Clock und dann mit LE das Wort scharf schaltet.
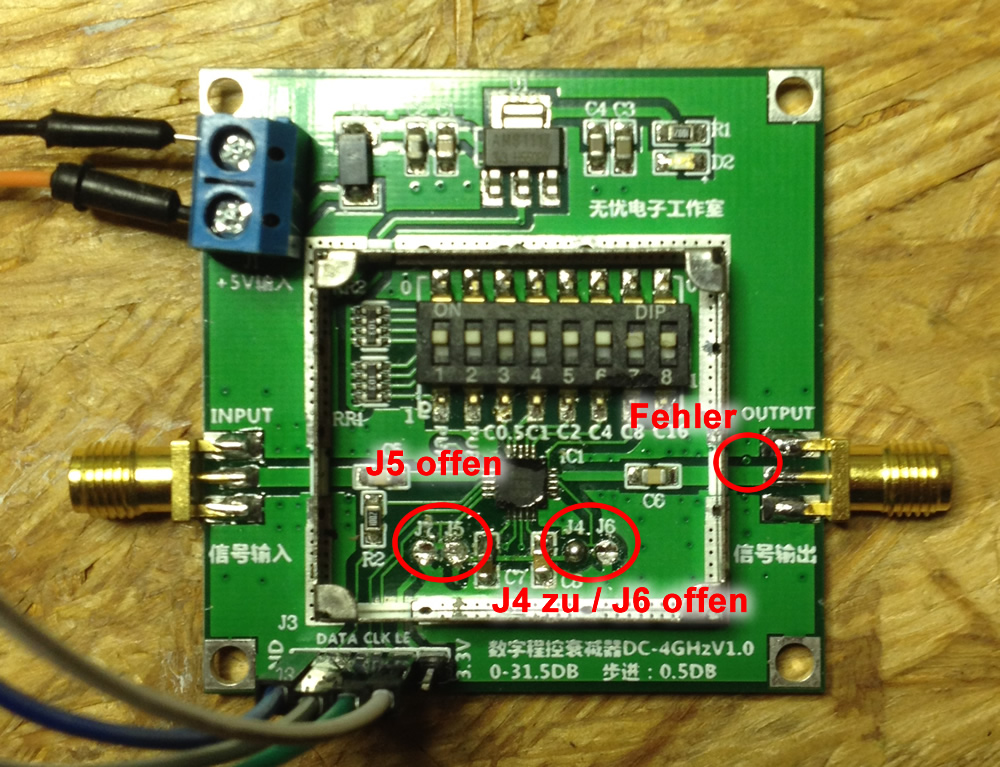
Doch zuerst ein Blick auf die gelieferte Platine. Da fallen gleich ein paar Fehler auf:
Am Ausgang in der Nähe des SMA Steckers ist eine Masse Durchkontaktierung direkt neben die Streifenleitung gesetzt worden. Da hat einer nicht aufgepasst.
Die Lötbrücke J5 ist gesetzt. Damit liegt LE direkt auf 3V und ist nicht ansprechbar. Diese Lötbrücke habe ich entfernt.
Die Lötbrücke J6 ist gesetzt. Damit ist P/S auf GND und somit auf den Parallelbetrieb eingestellt. Diese Lötbrücke habe ich entfernt. Für den Seriellen Betrieb habe ich die Lötbrücke J4 gesetzt und damit P/S auf 3V gelegt. Dann können die seriellen Daten akzeptiert werden.
Hier die Änderungen im Bild.
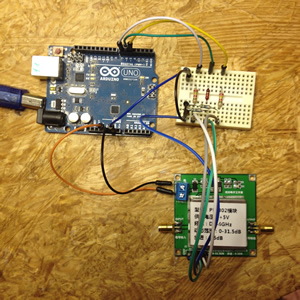
Dann wurde der Arduino Uno angeschlossen.
Die Spannungsversorgung des PE4302 Platine ist auf 5V ausgelegt und damit direkt am Arduino 5V Ausgang anschließbar.
Die Datenpegel des Uno Liegen bei 5V. Der PE4302 akzeptiert aber nur 3V. Hier wurden drei Spannungsteiler in den 3 Datenleitungen zwischengeschaltet jeweils mit 2,2 kOhm und 3,3k Ohm Widerständen um den PE4302 nicht zu beschädigen. Weiterlesen
Ein Poti kann die Stellung des Modellbau Servos vorgeben.
Dazu wird ein Poti mit ca. 1-100 kOhm an +5V und GND angeschlossen und der Mittelabgriff kommt auf einen analogen Arduino Eingang, z.B. A6.
Der Servo wird auch an +5V und GND angeschlossen und die Steuerleitung kommt an einen digitalen Ausgang, z.B. D2.
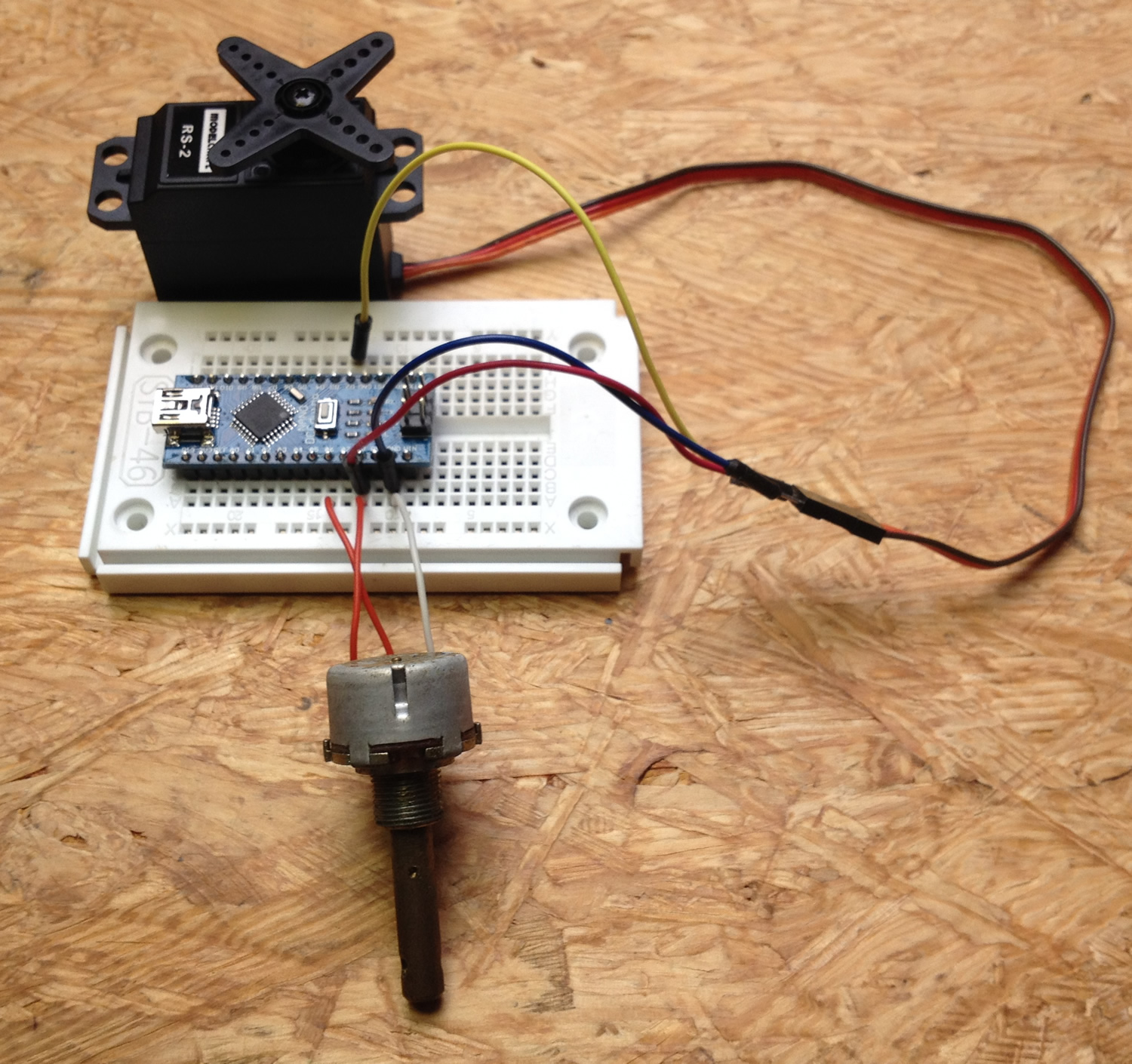
Von Arduino wird die Potispannung über den Analog Eingang von 0-1023 eingelesen und ein entsprechendes Pulssignal wird zum Servo ausgegeben. Weiterlesen