Der Servo Tester mit dem Timer IC NE555 und 2 Tasten für die rechts / links Drehung.

Die Erklärung: Weiterlesen

Der Servo Tester mit dem Timer IC NE555 und 2 Tasten für die rechts / links Drehung.
Die Erklärung: Weiterlesen
Dieser Servotester ist simpel mit Poti und Timer NE555 aufgebaut. Er erzeugt eine einstellbare Pulsweitenmodulation am Ausgang und kann so mit dem Poti den Servomotor einstellen.
Verwendet wurden:
Timer IC NE555, 100nF Kondensator, 1k Ohm Widerstand, 2 x 100k Ohm Widerstand, Diode N4148, Poti ca. 40kOhm oder etwas größer, Breadboard , Steckbrücken , 5V Stromversorgung , Servomotor
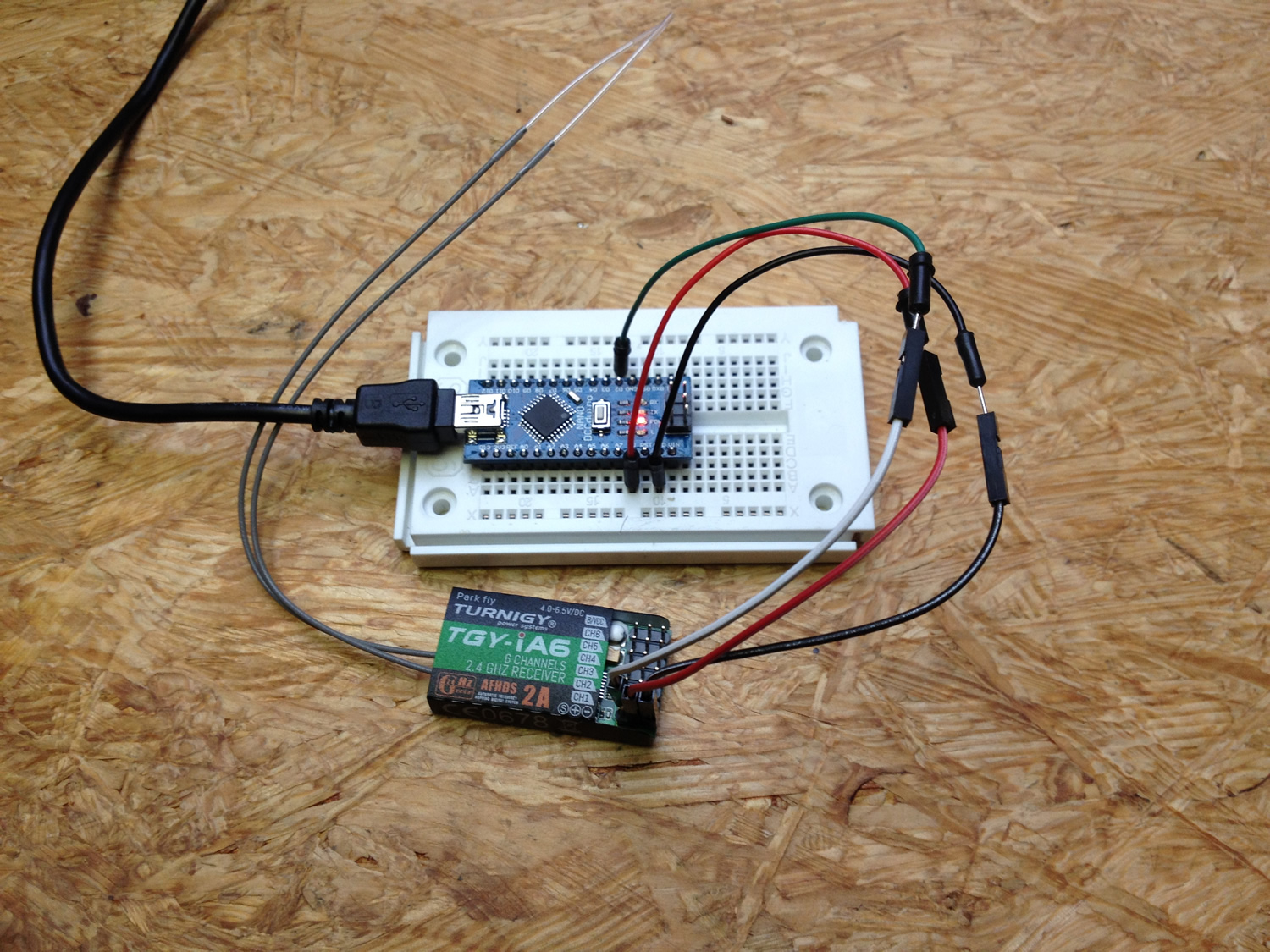
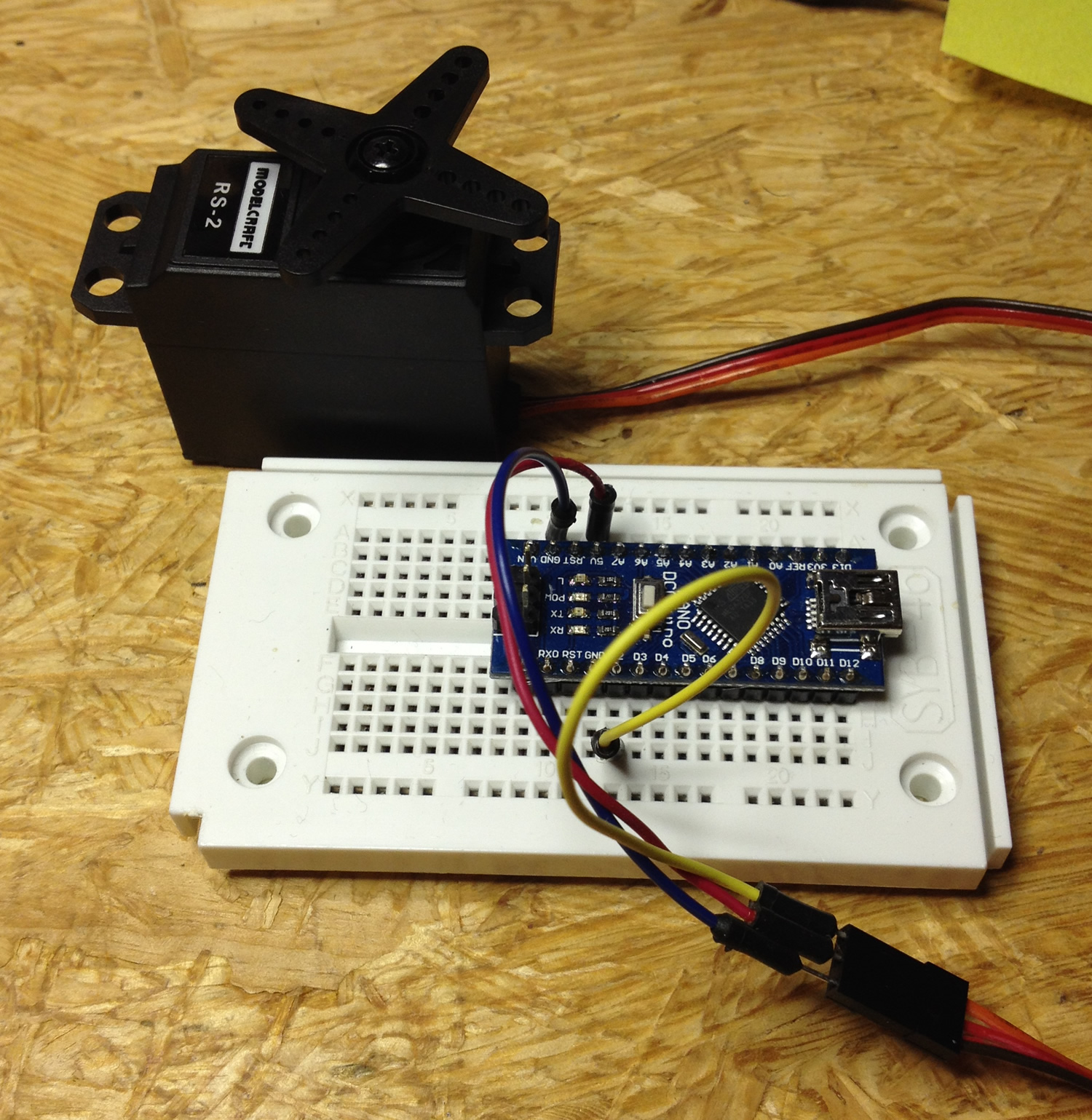
Der Fernsteuer Empfänger gibt die Servo Impulse raus. Diese Pulslänge möchte ich mit dem Arduino ermitteln und im Terminal ausgeben.
Dazu wird ein Servokanal an den Arduino angeschlossen.
+ an +5V
– an GND
Signal an D2
Hier das Programm mit serieller Ausgabe Weiterlesen
Ein Poti kann die Stellung des Modellbau Servos vorgeben.
Dazu wird ein Poti mit ca. 1-100 kOhm an +5V und GND angeschlossen und der Mittelabgriff kommt auf einen analogen Arduino Eingang, z.B. A6.
Der Servo wird auch an +5V und GND angeschlossen und die Steuerleitung kommt an einen digitalen Ausgang, z.B. D2.
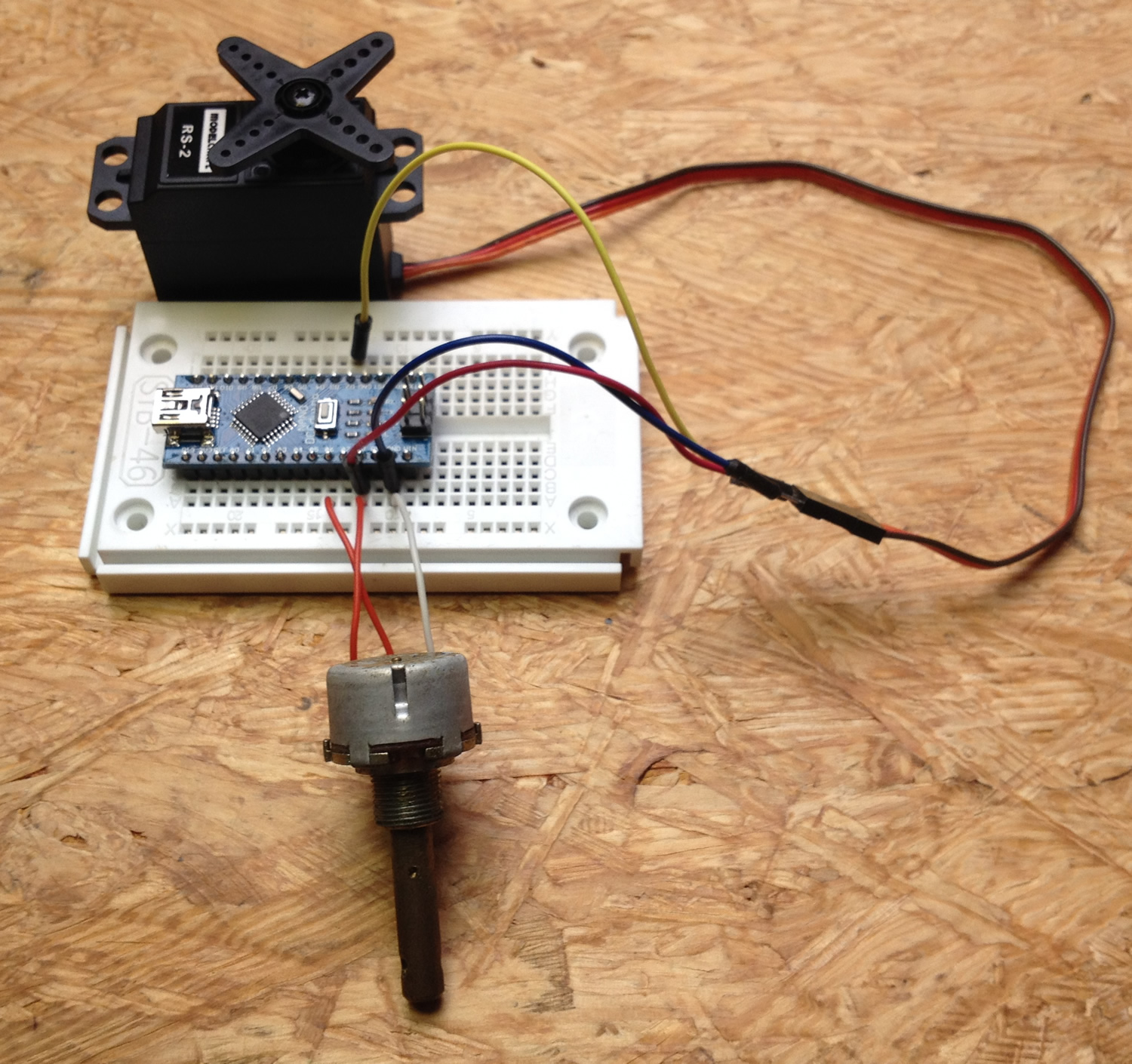
Von Arduino wird die Potispannung über den Analog Eingang von 0-1023 eingelesen und ein entsprechendes Pulssignal wird zum Servo ausgegeben. Weiterlesen
Ein Modellbau Servo kann direkt vom Arduino Pin angesteuert werden.
Der Servo reagiert auf Pulslängenänderungen. Ein 5V Puls ist 1-2 Millisekunden lang und dann folgt eine Pause mit 0V von ca. 20 ms bis zum nächsten Puls.
Ein Puls mit 1 ms bedeutet linker Anschlag.
Ein Puls mit 1,5 ms bedeutet Mittelstellung.
Ein Puls mit 2 ms bedeutet rechter Anschlag.
Wird die Pulsdauer von 1 ms zu 2 ms kontinuierlich verändert, dreht der Servo langsam zum Vollausschlag.
Zur Stromversorgung bekommt der Servo noch Strom vom Arduino
+5V > Servoleitung rot
GND > Servoleitung schwarz
Und die Signalleitung
A2 > Servoleitung orange oder gelb Weiterlesen