Hier habe ich mit einem einfachen 4069 6-fach CMOS Inverter IC einen VCO aufgebaut von 2 – 35MHz, also einen Spannungsgesteuerten Oszillator.
Die einfache Schaltung:

Der Aufbau auf dem Breadboard: Weiterlesen

Hier habe ich mit einem einfachen 4069 6-fach CMOS Inverter IC einen VCO aufgebaut von 2 – 35MHz, also einen Spannungsgesteuerten Oszillator.
Die einfache Schaltung:
Der Aufbau auf dem Breadboard: Weiterlesen

Zwei Inverter , 3 Widerstände und 2 Taster werden benötigt um eine Ein-Aus Schaltung aufzubauen. Die Schaltung wird auf dem Breadboard aufgebaut, der Schaltplan wird erklärt und mit einem MOSFET erweitert. Im Datenblatt wird die Stromaufnahme von ca 1uA gezeigt wenn die Schaltung aus ist Weiterlesen
Der Servo Tester mit dem Timer IC NE555 und 2 Tasten für die rechts / links Drehung.

Die Erklärung: Weiterlesen
Der MAX4820 low side MOSFET Treiber für 8 Lastanschlüsse wird vorgestellt, aufgebaut und mit einen Microcontroller / Arduino angesteuert.
Verwendet wurden:
MAX4820 IC , Spannungsanschlussbrücke, LEDs, Breadboard, Steckbrücken.
Das Programm: Weiterlesen
Mit dem ULN280x IC können vom Microcontroller aus Geräte mit höheren Strömen und Spannungen angesteuert werden wie Relais, Motoren oder Lichter. Es werden 8 Eingänge zu 8 Ausgängen invertiert geschaltet. Ein High (5V) am Eingang schaltet den Ausgang durch (Low oder 0V). Es ist also ein Inverter mit einer großen Stromverstärkung.
Verwendet wurden:
ULN2803 IC, 3 LEDs mit Vorwiderständen, Breadboard und Steckbrücken, Spannungsanschluss & Brücke, Zwei Spannungsanzeigen aus diesem Video.
Hier wird über die LC Resonanzfrequenz eine Spulen Induktivität ermittelt.
Ein Resonator wird auf dem Breadboard aufgebaut, die Resonanzfrequenz Formel wird nach L umgestellt. Die Frequenz wird gemessen und mit dieser Formel wird in der Tabellenkalkulation die Induktivität L berechnet.
Verwendete Bauteile zum Nachbau:
6 Inverter , Steckbrett, Steckbrücken, Anschlußstecker
Der Taster schaltet die Spannung ein und aus.
Als Latch wird ein Standard C-MOS Inverter 4069 verwendet welches den Schaltzustand festhält.
Ein RC Glied überbrückt die Zeit falls der Taster prellen sollte.
Die Versorgungsspannung kann 3V … 18V betragen.
Die Schaltung braucht im Ruhezustand weniger als 1uA und ist so vielseitig einsetzbar.
Nur bei Batterieanwendungen sollte man das ggf. einmal genauer kalkulieren.
Die verwendeten Bauteile:
6-fach Inverter IC, Anschlußklemme , 10kOhm , LED , Taster , Steckbrett , Leitungsbrücken
So kann eine einfache Konstantstromquelle aufgebaut werden mit einen Spannungsregler LM317 und einem Widerstand. Der Widerstand bestimmt die Stromstärke.
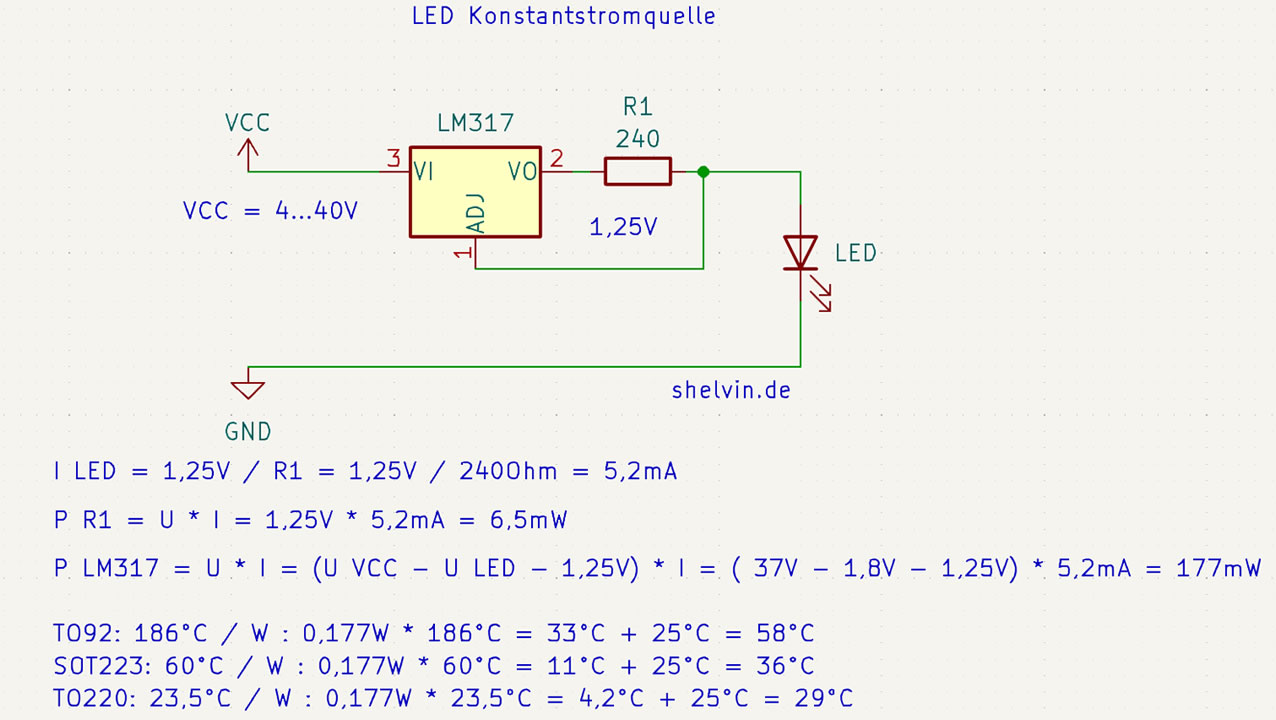
Der Aufbau Weiterlesen

Ich habe hier einen simplen USB Stick aus China. Er wird dort z.B. unter der Bezeichnung VK-172 verkauft für unter 10 Euro. Verbaut ist ein u-blox7 Chip UBX-G7020-KT. Die GPS Patch Antenne ist eingebaut sodass es ein kompletter GPS Empfänger in einem sehr kleinen Gehäuse ist. Er hat auch schon einen USB A Anschluß Stecker dran.

Im Datenblatt ist angegeben dass er auch ein 1 PPS (1 Impuls pro Sekunde) raus geben kann und das Signal mit dem GPS Signal synchronisiert ist. Weiterlesen

Im Moment (Ende 2022) sind Arduinos schlecht zu bekommen, da die Chips ATMEGA328P Mangelware sind. Ich habe mich etwas umgesehen und bin auf das Board „Blue Pill“ mit einem STM32F103C8T6 Chip gestossen. Dieses ist weiterhin günstig zu bekommen und ist ähnlich wie der Arduino Nano aufgebaut.
Es hat aber einige Vorteile:
– 72MHz Taktfrequenz
– RTC Uhr eingebaut
– 64kB Flash Speicher und 20kB RAM
– 12bit AD Wandler
– 3x USART serielle Schnittstelle (Rx / TX)
– 2x SPI, 1x I²C, 1 x CAN Schnittstelle
– 37 GPIO Anschlüsse
– 3,3V für Spannungsversorgung und Daten, wobei viele Datenleitungen 5V tolerant sind.
und einiges mehr.