Der Servo Tester mit dem Timer IC NE555 und 2 Tasten für die rechts / links Drehung.

Die Erklärung: Weiterlesen

Der Servo Tester mit dem Timer IC NE555 und 2 Tasten für die rechts / links Drehung.
Die Erklärung: Weiterlesen
Dieser Servotester ist simpel mit Poti und Timer NE555 aufgebaut. Er erzeugt eine einstellbare Pulsweitenmodulation am Ausgang und kann so mit dem Poti den Servomotor einstellen.
Verwendet wurden:
Timer IC NE555, 100nF Kondensator, 1k Ohm Widerstand, 2 x 100k Ohm Widerstand, Diode N4148, Poti ca. 40kOhm oder etwas größer, Breadboard , Steckbrücken , 5V Stromversorgung , Servomotor
Die Kappe von meinem Sonnenschirmständer auf der Terrasse ist zerbrochen.
Hier die Dateien zum Nachdrucken.
Der Nachbau hat die 4 anfälligen Klemmhalter nicht mehr. Dafür hat er jetzt ein kleineres Loch und passt stramm um die Stange vom Schirmständer.
Hier noch ein paar Bilder:

Die zerbrochene Kappe.
Morgen soll der Mast gestellt werden und ich finde meinen Zwischenring für die Aquasignal Laterne mit QuickFit nicht. Ich glaube ich habe ihn letztes Jahr zerbrochen beim Mast legen und über den Winter ganz vergessen einen neuen zu bestellen. Da hab ich schnell noch einen mit FreeCAD gezeichet und auf dem 3D-Drucker ausgedruckt.

Hier bei Thingiverse liegen die Dateien zum Nachdrucken.
Der nachgemachte Ring ist wesentlich einfacher aufgebaut als der originale Ring, aber er paßt gut und wird seinen Dienst tun.
von Matthias Busse
Ich habe eine Endkappe gezeichnet und ausgedruckt.
Sie ist für ein 30x30mm Aluminium Rohr mit einer Wandstärke von 1,5mm ausgelegt.
Ein Loch für eine M8 Schraube ist vorgesehen und eine M8 Mutter kann versenkt eingelegt werden. Weiterlesen
Heute auf dem Flohmarkt habe ich 10mm Silikonschlauch gefunden, damit habe ich 4 elastische Füße gebaut.
Ich habe 4 x 35cm davon abgeschnitten, an den Enden zwei 3mm Löcher gebohrt und das ganze zwischen jeweils 2 Unterlegscheiben festgeschraubt.
Das sorgt hoffentlich dafür dass die Alu Arme nicht mehr verbiegen bei einer unglücklichen Landung und er hoch und sicher im Gras steht. Bislang hat er das Gras abmäht und dadurch hatte ich immer schnell wieder unwuchtige Propeller. Weiterlesen
Ich habe einen X525 Quadrokopter mit Multiwii Controller zusammengebaut. Nach vielen Versuchen mit den PID Werten für die Lageregelung im Multiwii Board ist er nicht ordentlich geflogen. Einige Abstürze, verbogene Arme und einige zerbrochene Propeller später habe ich ihn mit einer waagerechten Leine und USB Kabel zum PC abgeglichen. Dann ging es einigermassen.
Im Flug dreht er aber immer noch häufig weg, verliert also den Kurs. Wenn er dann weiter weg fliegt ist es sehr schwierig ihn wieder zurück zum Startpunkt zu bekommen. Ausserdem reagiert er sehr stark auf Vibrationen wenn die Propeller nicht ordentlich ausgewuchtet sind, er lässt sich dann zum Teil gar nicht mehr fliegen und schmiert schnell ab. Das führt immer wieder zu Bruch. Die Alu Arme verbiegen und auch die Motorhalter brechen weg. Das verwendete Alu Profil 13x13x0,5mm ist hier nicht als Meterware zu bekommen.
Die vier Motoren und die 30A Speedcontroller sind OK und werden weiter verwendet. Die Grundplatte ist gut und dafür vorgesehen die Arme für den Transport zusammenzuklappen. Das soll dieses mal auch funktionieren.
Nun baue ich ihn neu auf, nachdem ich aus den vorherigen Fehlern gelernt habe. Weiterlesen
Mein FPV Bildschirm hat Streifen, die durch die ESC Speedkontroller der Motoren verursacht werden. Das ist zu erkennen wenn ich Gas gebe und die Streifen im Display stärker werden.
Ich habe einen einfachen und gut funktionierenden LC Filter für meine FPV Kamera am Quadrokopter aus alten Teilen zusammen gelötet.
Eine Induktivität mit ca. 100 uH in Reihe in die Plus Leitung vom Akku.
Und zwei Kondensatoren dahinter zwischen die + und – Leitung.
Ein grosser Elko mit 1000uF 25V und parallel dazu einen kleinen Tantal Kondensator 1uF 35V.
Alle Teile sind gebraucht von einer PC Platine / Motherboard gekommen.
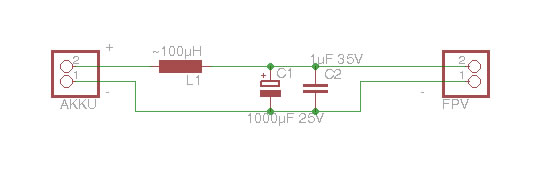
Danke André für die Zeichnung.
Hier das Ergebnis bevor der Schrumpfschlauch drüber kommt. Weiterlesen
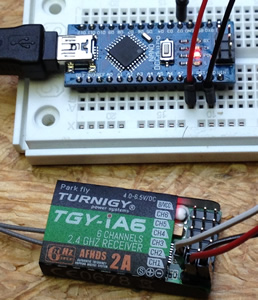
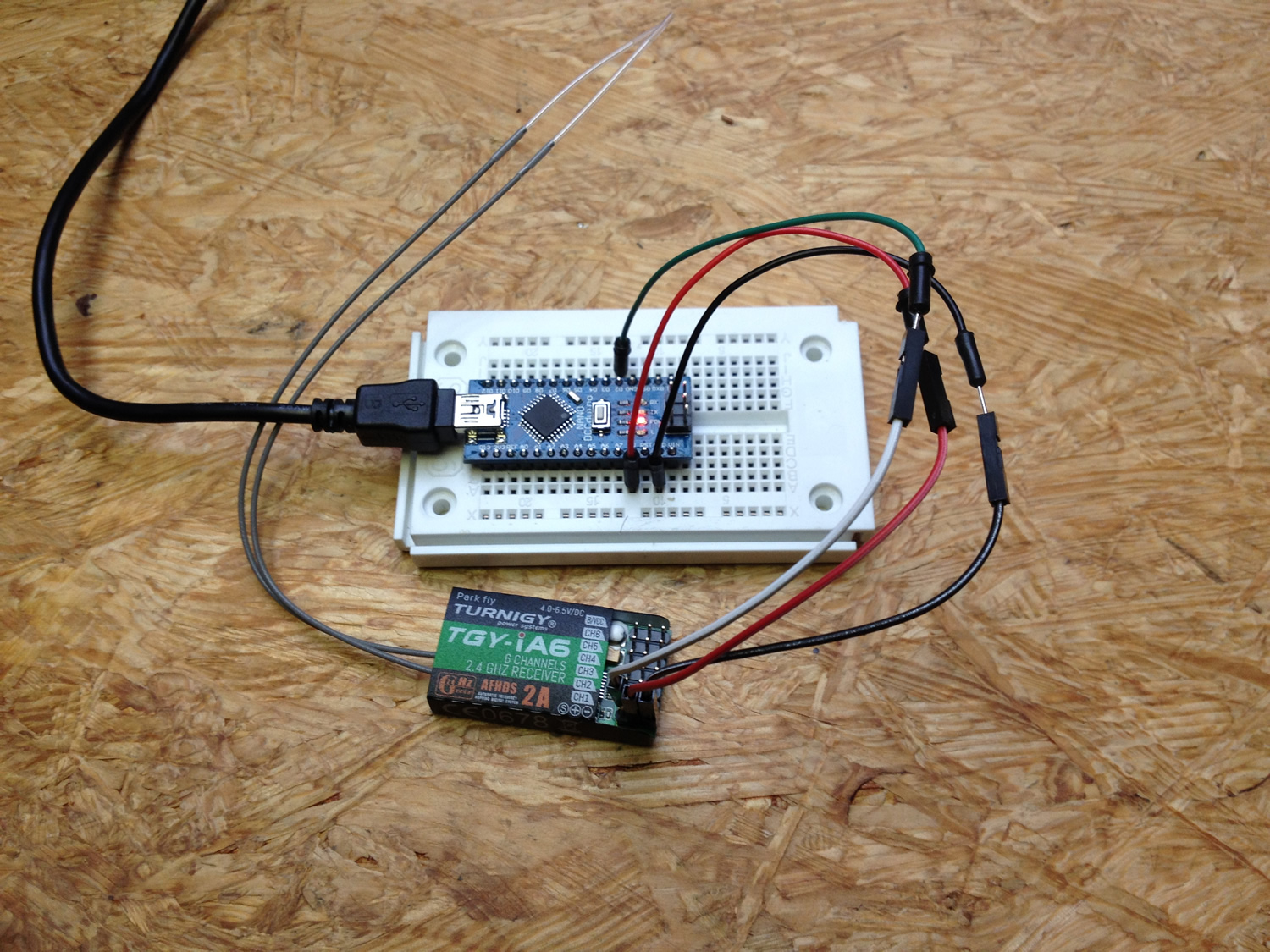
Der Fernsteuer Empfänger gibt die Servo Impulse raus. Diese Pulslänge möchte ich mit dem Arduino ermitteln und im Terminal ausgeben.
Dazu wird ein Servokanal an den Arduino angeschlossen.
+ an +5V
– an GND
Signal an D2
Hier das Programm mit serieller Ausgabe Weiterlesen
Ein Poti kann die Stellung des Modellbau Servos vorgeben.
Dazu wird ein Poti mit ca. 1-100 kOhm an +5V und GND angeschlossen und der Mittelabgriff kommt auf einen analogen Arduino Eingang, z.B. A6.
Der Servo wird auch an +5V und GND angeschlossen und die Steuerleitung kommt an einen digitalen Ausgang, z.B. D2.
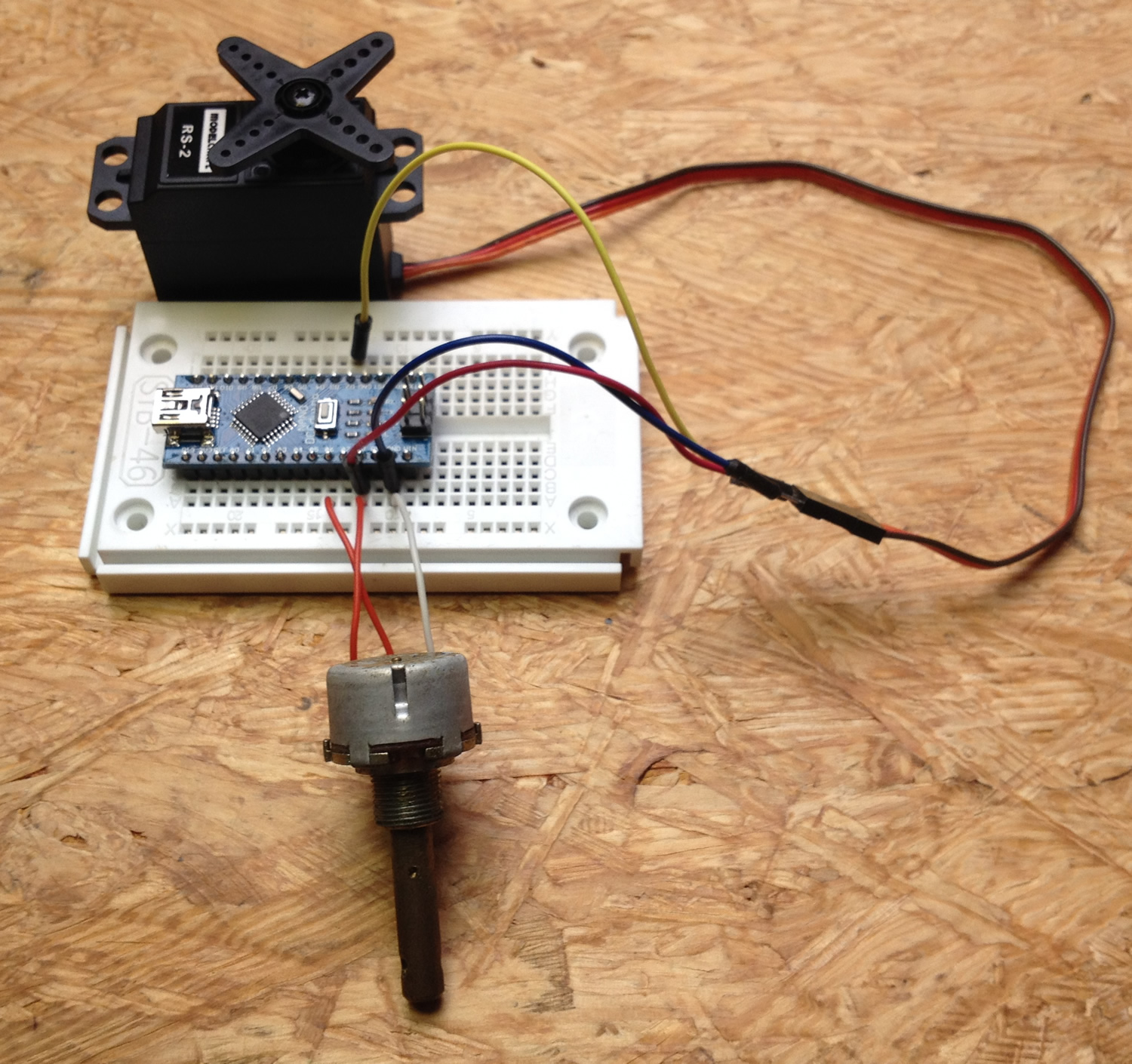
Von Arduino wird die Potispannung über den Analog Eingang von 0-1023 eingelesen und ein entsprechendes Pulssignal wird zum Servo ausgegeben. Weiterlesen