
Ich habe einen X525 Quadrokopter mit Multiwii Controller zusammengebaut. Nach vielen Versuchen mit den PID Werten für die Lageregelung im Multiwii Board ist er nicht ordentlich geflogen. Einige Abstürze, verbogene Arme und einige zerbrochene Propeller später habe ich ihn mit einer waagerechten Leine und USB Kabel zum PC abgeglichen. Dann ging es einigermassen.
Im Flug dreht er aber immer noch häufig weg, verliert also den Kurs. Wenn er dann weiter weg fliegt ist es sehr schwierig ihn wieder zurück zum Startpunkt zu bekommen. Ausserdem reagiert er sehr stark auf Vibrationen wenn die Propeller nicht ordentlich ausgewuchtet sind, er lässt sich dann zum Teil gar nicht mehr fliegen und schmiert schnell ab. Das führt immer wieder zu Bruch. Die Alu Arme verbiegen und auch die Motorhalter brechen weg. Das verwendete Alu Profil 13x13x0,5mm ist hier nicht als Meterware zu bekommen.
Die vier Motoren und die 30A Speedcontroller sind OK und werden weiter verwendet. Die Grundplatte ist gut und dafür vorgesehen die Arme für den Transport zusammenzuklappen. Das soll dieses mal auch funktionieren.
Nun baue ich ihn neu auf, nachdem ich aus den vorherigen Fehlern gelernt habe.
Die Arme baue ich selbst mit Alu Vierkantprofil aus dem Baumarkt 15x15x1 mm. Die Lochmaße werden vom alten Arm abgenommen. Die Arme werden 4cm verkürzt und sollen wenn möglich klappbar gehalten werden für einen einfachen Transport. Nun kann ich die Arme jederzeit selbst nachbauen. Er wird dadurch auch etwas stabiler und ich hoffe auf weniger Vibrationen.
Als Flightcontroller habe ich den Ardukopter AMP2.6 von 3DRobotics gewählt. Er hat einen abgesetzte GPS und Kompasssensor und einen klappbaren Standhalter dafür. Dadurch lässt sich nun die Magnetfeldmessung in einem guten Abstand zu dem Stromverteiler durchführen. Davon erhoffe ich mit eine stabile Vorausrichtung.
Durch den besseren Prozessor und GPS soll er Position Hold , Return to Landing und einige Funktionen mehr haben. Bin ich mal gespannt, ob das alles so funktioniert. Ausserdem lernt er die PID Regler Werte und stellt sich selbst ein.
Der Flightcontroller und das GPS sind in zwei Gehäusen geschützt untergebracht.
Es ist auch ein Strommessshunt mit 5V Powerausgang für den Flightcontroller im Set. Damit werde ich auch das Stromverteilerboard ersetzen und die Kabel hier direkt anlöten.
Ansonsten werden die alten Teile weiter verwendet.
Die Stromverteilung wird komplett in das Zwischendeck gelegt.
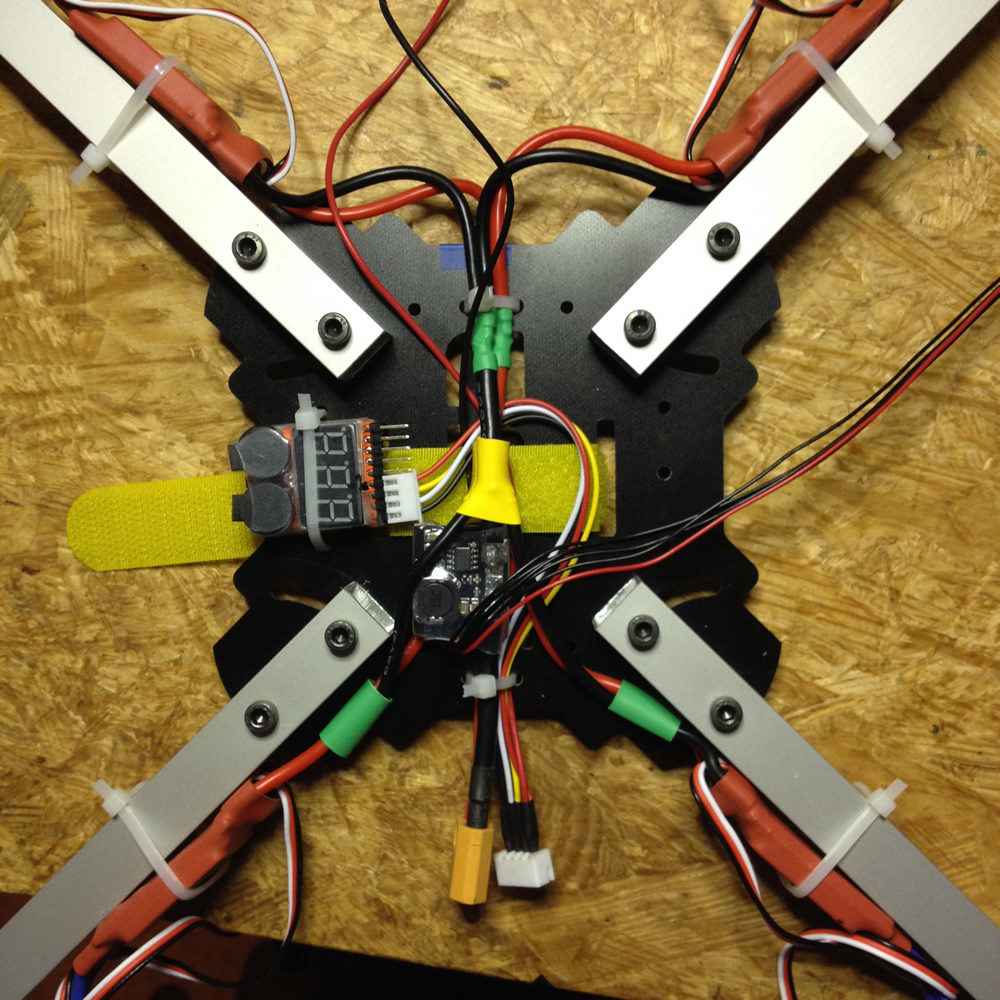
Unten in der Mitte sieht man den orangen Akku Anschluss mit XT60 Stecker. Darüber die Powerschaltung vom Ardukopter mit Strommessfühler und den 5V Ausgangsleitungen zum Flightcontroller rechts. Darüber sind die 4 ESC (Motor Regler) an das Akkukabel angelötet und mit gelbem und grünem Schrumpfschlauch geschützt.
Unten sieht man auch den weissen Akku Balancer Anschluss, der direkt auf den Lipo Warner links geführt ist und zusätzlich noch die volle Akkuspannung rausgeführt hat für einen späteren FPV Anschluss, also eine Kamera mit Bildübertragung an eine Brille. Diese beiden Kabel gehen oben mittig raus.
An den 4 Motorarmen sind die roten ESC Speedcontroller mit Kabelbindern befestigt.
Das gelbe Klettband in der Mitte soll später den Akku unter dem Flieger festhalten.
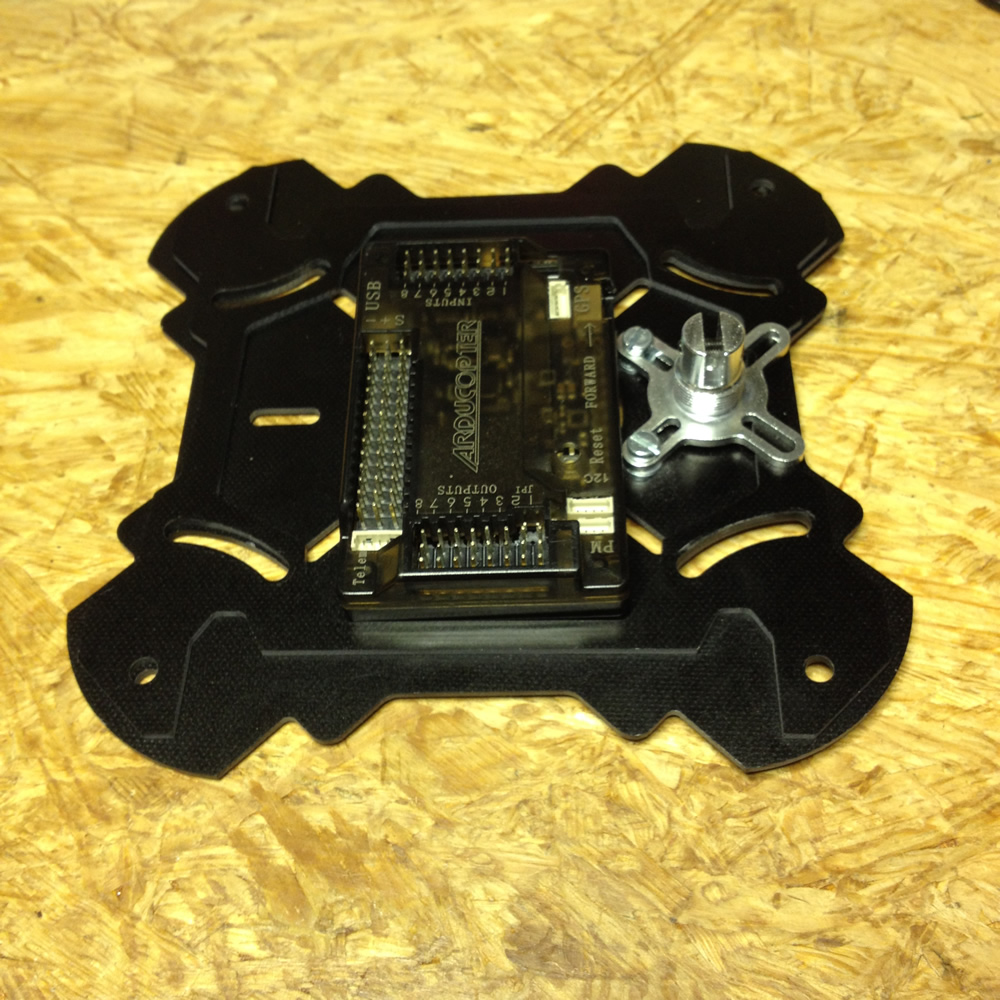
Auf dem Gehäuseoberteil wird später der Flightcontroller, der GPS mit Standfuß und der Empfänger der Fernbedienung untergebracht. Nach den ersten Flugtests ist dann eine FPV (First Person View) Kamera mit OSD (On Screen Display) und 5,8 GHz Sender zu meiner Brille geplant.
Der Flightcontroller AMP 2.6 soll ca. mittig liegen, dann muss der Antennenstandfuß nach rechts versetzt werden. Hier ist das X-525 Oberteil aussen aber 2-lagig verstärkt, sodass ich links die M3x8 Schrauben mit 3 Unterlegscheiben versehen habe um die Höhe nach rechts zu halten und einen senkrechten Standfuß zu bekommen. Als dritte Schraube wird von unten zentrisch eine M3x8 Schraube auch mit 3 Unterlegscheiben verwendet. Das wird halten.
von Matthias Busse
Pingback: Elastische Füße für den X-525 Quadrokopter | Shelvin – Elektronik ausprobiert und erläutert