Hier habe ich mit einem einfachen 4069 6-fach CMOS Inverter IC einen VCO aufgebaut von 2 – 35MHz, also einen Spannungsgesteuerten Oszillator.
Die einfache Schaltung:

Der Aufbau auf dem Breadboard: Weiterlesen

Hier habe ich mit einem einfachen 4069 6-fach CMOS Inverter IC einen VCO aufgebaut von 2 – 35MHz, also einen Spannungsgesteuerten Oszillator.
Die einfache Schaltung:
Der Aufbau auf dem Breadboard: Weiterlesen

Den USB GPS Stick aus dem vorherigen Beitrag habe ich genommen und möchte die PPS Frequenz auf 2MHz einstellen.
Dazu gibt es bei u-blox die Software u-center kostenlos. Ich habe hier die Version 22.07 installiert und den USB GPS (bei mir COM 9) verbunden.
Receiver > Connection > COM9
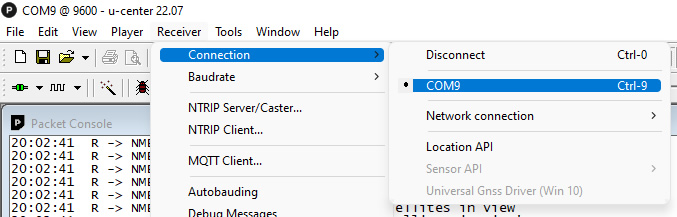
Dann habe ich unter View > Configuration View das Fenster geöffnet Weiterlesen
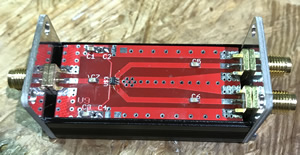
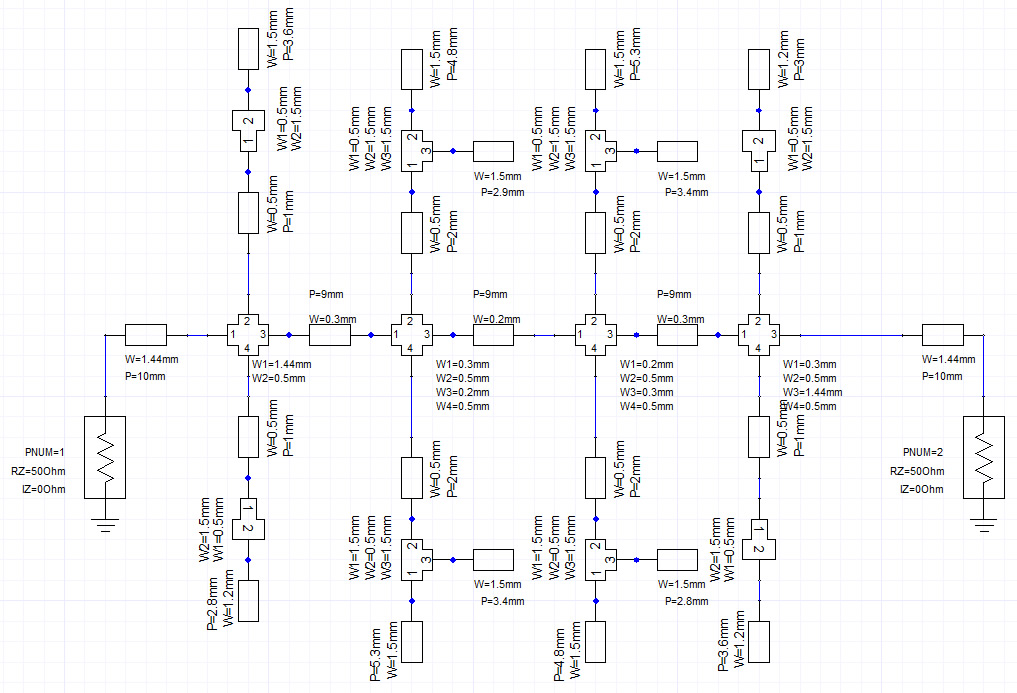
Ich habe einen Branchine (Quadratkoppler) in Microstrip Technik auf einer 0,8mm dicken FR4 Platine simuliert, aufgebaut und vermessen.
Ein Branchline Koppler hat 4 Anschlüsse ( 4 Ports ).
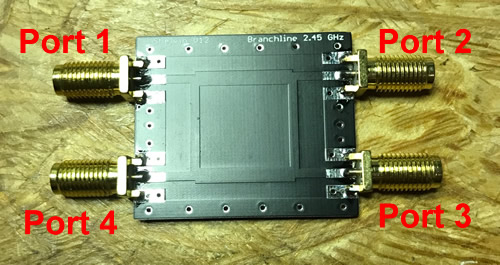
Ein Signal von Port1 (links oben) wird zu Port 2 und Port 3 (beide rechts) geleitet und erscheint an den beiden Ports mit jeweils der halben Leistung, also -3dB und 90 Grad Phasenverschoben.
Der Port 4 (links unten) ist dabei entkoppelt und hier kommt so gut wie keine Leistung an, wenn Port 2 & 3 mit 50 Ohm abgeschlossen werden, z.B weniger als -20dB. Weiterlesen
Hier stelle ich einen programmierbaren Frequenzgenerator mit dem DDS Baustein AD9833 vor.
Er wird vom Arduino angesteuert und ist über ein Terminal Programm vom PC aus einstellbar für Frequenz und Kurvenform.
Frequenzen: 1Hz bis einige MHz in 1Hz Schritten, quarzgenau
Kurvenformen: Sinus, Dreieck und Rechteck
Von Analog Devices das Datenblatt AD9833 und die Application Note AN-1070.
Dort findet Ihr weitere Infos zum IC und zu der Ansteuerung. Weiterlesen
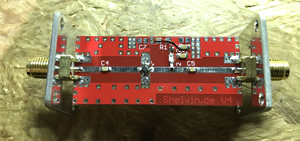
Der MGA 86563 Verstärker arbeitet laut Datenblatt von 500MHz bis 6 GHz. Er hat eine geringe Rauschzahl von 2 und der IP1dB liegt bei 4 dBm, damit ist er als preiswerter Kleinsignalverstärker einsetzbar.
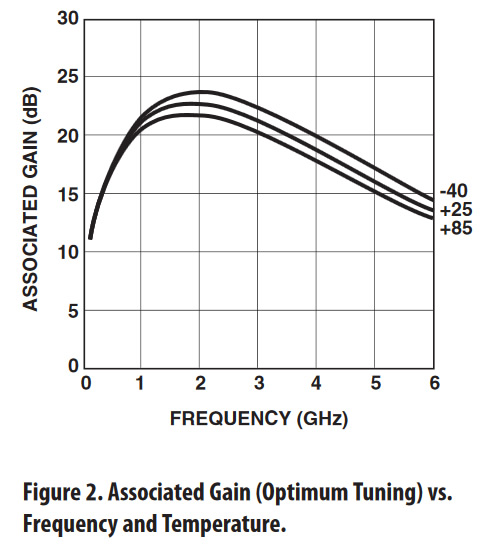
Die Verstärkung ist Frequenzabhängig und kann bis zu 23dB betragen. Hier der Verstärkungsverlauf über die Frequenz bei verschiedenen Temperaturen aus dem Datenblatt.
Die Spannungsversorgung am Ausgang soll 5V betragen. Sie wird über eine Induktivität von 22nH eingespeist. Hier die Simulation dazu ohne den Verstärker. Weiterlesen
Ich habe einen Umschalter aufgebaut mit dem AS179-92LF IC von Skyworks.
Einen SPDT – Single Pole Double Throw oder auf deutsch Wechselschalter.
Das heisst Eingang zu Ausgang 1 oder Eingang zu Ausgang 2, je nachdem welcher Schalterpin HIGH und LOW ist.
Die typische Schaltspannung für den AS179-92LF Schalter liegt bei LOW: 0-0,2V und HIGH 2-6V Maximal sind -1,2V bis 8V erlaubt.
Bei einer maximalen Stromaufnahme von 200uA.
Dabei ist immer ein Pin HIGH und einer LOW.
Er kann Leistungen bis 500MHz von 0,5W schalten und über 500MHz bis zu 6W.
Der IP1dB liegt bei ca. 30dBm / 1W bei 5V Schaltspannung. Weiterlesen

Ich habe einen Resistiven Leistungsteiler bis in den GHz Bereich aufgebaut. Er besteht aus 50 Ohm Microstrip Leitungen und in der Mitte 3 x 16 Ohm Widerständen im Stern geschaltet.
Idealerweise wird die Eingangsleistung vom Eingang zur Hälfte in den Widerständen in Hitze umgewandelt und der Rest / 2 steht an jedem Ausgang zur Verfügung, das sind 6dB Durchgangsdämpfung.
Der Vorteil gegenüber einem Wilkinson Teiler mit 3dB Durchgangsdämpfung ist, dass der Resistive Teiler auch schon bei wenigen Herz funktioniert und sehr einfach aufzubauen ist.
Der Nachteil ist daß er 6dB Durchgangsdämpfung hat.
Ich habe drei gleiche 0805 SMD Widerstände verwendet mit ausgesuchten 16,2 Ohm, ideal wären 16,666 Ohm, aber das ist nicht sehr kritisch. Sie sind kopfüber verlötet, dadurch liegt die Widerstandsschicht auf der Platine und es sind etwas höhere Frequenzen erreichbar.
Ich habe die Schaltung 2x aufgebaut und vermessen. Weiterlesen

Mein nächstes Projekt ist ein Tiefpaß Filter für 2,2 GHz. Bis zu dieser Frequenz sind auch diskrete L und C Elemente einsetzbar. Hier kann man aber auch schon Streifenleitungsfilter aufbauen.
Dazu werden zum einen dünne (hochohmige) Leitungen in Reihe verwendet, die einer Induktivität in Reihe entsprechen. Und zum anderen breite (niederohmige) offene Stichleitungen parallel die besonders mit den offenen Enden einer Kapazität gegen Masse entsprechen.
Das kann in der Simulation im Ansoft Designer dann so aussehen
Und hier das Simulationsergebnis im Ansoft Designer Weiterlesen
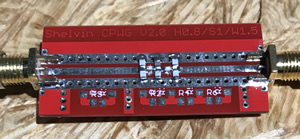
Ich habe einen Tiefpass 5. Ordnung für eine Grenzfrequenz von 1,1 GHz entworfen
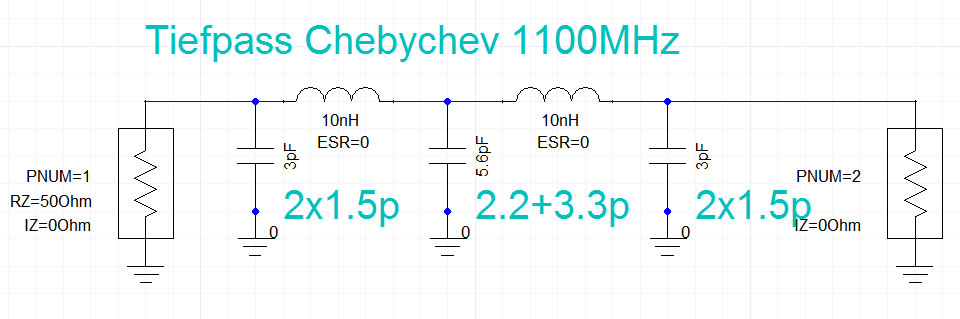
und simuliert mit dem Ansoft Designer.
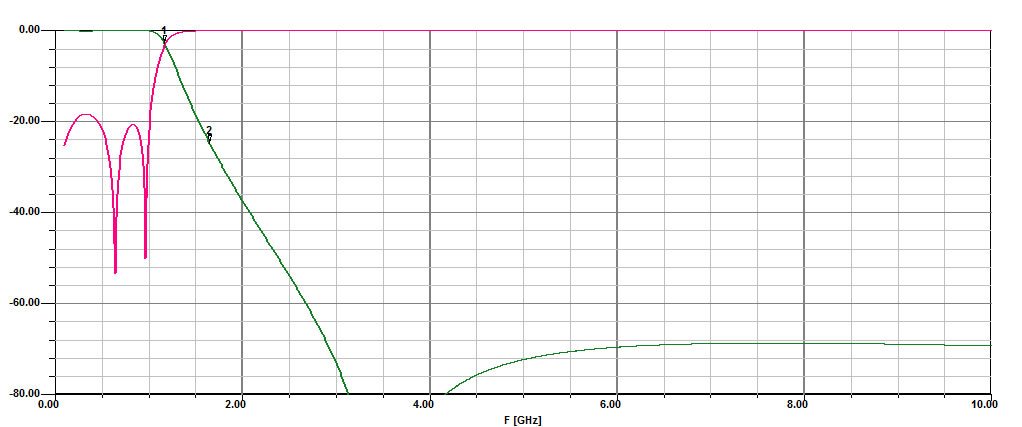
Auf der CPWG 2.0 Platine mit diesen Werten in SMD aufgebaut Weiterlesen
Von meinen Projekten habe ich hier noch einige Platinen.
Ich habe immer ein paar Platinen mehr machen lassen. Wenn also jemand die Schaltungen nachbauen möchte oder eigene Ideen hat kann ich die Platinen im Brief in Deutschland für 2 Euro verschicken. Ich verschicke nicht ins Ausland.
Die Platinen sind unbestückt und neu, ohne Stecker und andere Bauteile, nur die Platinen.
1. Platine CPWG 1.1
50 Ohm Leitung durchgehend, Masse Fläche durchkontaktiert daneben,
SMA Anschluß an beiden Seiten.
Material FR4, Dicke 1 mm, Außenmaß 14 x 50 mm
Aus dem Beitrag: Tiefpass 5. Ordnung für 190 MHz simuliert und aufgebaut

Preis pro Platine: 5,00 €, Anzahl verfügbar: 3 Stück Weiterlesen