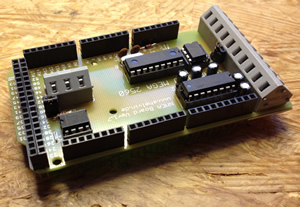
Endlich ist es fertig, das NMEA Shield 1.7 für den Arduino Mega 2560 ist da.
Andre und ich haben ein eigenes Arduino Shield entwickelt mit den NMEA Schnittstellen:
2 x NMEA0183 / RS232
1 x N2k (NMEA2000) / CAN Bus
1 x RS485
1 x USB ( durch den Arduino Mega darunter ist natürlich auch ein USB Port vorhanden )
Ein N2k (NMEA2000) Abschlußwiderstand kann mit einem Jumper eingeschaltet werden, wenn das Shield am Ende eines NMEA2000 Backbones betrieben werden soll. Normalerweise ist dieser Jumper aber nicht gesteckt.
Ein Abschlusswiderstand für den RS485 Eingang kann auch per Jumper zugeschaltet werden. Weiterlesen