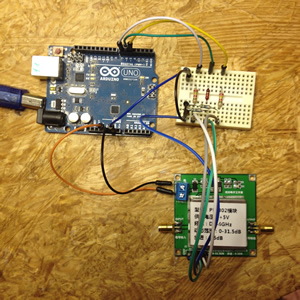
Mit dem AFD4351 von Analog Devices lassen sich Frequenzen von 35 MHz bis 4,4 GHz erzeugen. Er ist digital vom Arduino ansteuerbar. Die Frequenz und Ausgangsleistung kann eingestellt werden. Damit ist er prima als Synthesizer zur Frequenzerzeugung geeignet.
Der interne VCO erzeugt 2,2 – 4,4 GHz und ist PLL gesteuert stabil. Diese Frequenzen können direkt als Sinus ausgegeben werden. Die Frequenzen darunter werden über digitale Frequenzteiler erzeugt, das heißt es werden Rechteck Signale ausgegeben mit den entsprechenden Oberwellen nach der Fourier Reihe.
Vom PC ist das Programm über die serielle Ausgabe steuerbar. Mit der Eingabe von h im Seriellen Monitor des Arduino Programms oder einem anderen Terminal Programm gibt es die Hilfe für die akzeptierten Steuerbefehle. Weiterlesen