Das Kondensator Meßgerät bekommt ein LCD Display.
Arduino Kondensator Messgerät mit LCD – Teil 2
6 Antworten

Das Kondensator Meßgerät bekommt ein LCD Display.
The arduino can measure a capacitor with only two resistors in a range from 10nF to 2000 uF. The theory, the simple circuit on a bread board and the Arduino program explained.
Der Arduino misst die Kapazität eines Kondensators.
Die Theorie, der Schaltungsaufbau und das Arduino Programm.
The Arduino can measure its own processor voltage VCC. With a long USB cable this voltage can drop to e.g. 4,5V. That is important if you want to make a simple measurement with the AD converters on board.
Der Arduino kann seine Versorgungsspannung am Prozessor messen. Über ein langes USB Kabel kommen z.B. nur noch 4,5V am Prozessor an. Für eine einfache AD Messung muss dieser Wert ermittelt werden. Das wird hier gezeigt.
Ich habe hier den Seeeduino mit dem Base Shield und bin an einem Fehler fast verzweifelt.
Der Seeeduino kann auf 3,3V oder 5V Datenspannung umgestellt werden. Dazu gibt es das Base Shield zum einfachen anstecken der Grove Sensoren. Auch hier ist ein 3,3V / 5V Umschalter.
Wenn beide Schalter unterschiedlich eingestellt sind lässt sich das Programm nicht aus der Arduino Software auf den Seeeduino laden. Dann kommt die Fehlermeldung:
avrdude: stk500_recv(): programmer is not responding
oder
avrdude: stk500_getsync …
und viele weitere Zeilen mit Fehlermeldungen.
Das als Hilfe falls Ihr das selbe Problem habt. Einfach beide Schalter auf die selbe Spannung einstellen und alles funktioniert zusammen.
Verwendet wurden:
Seeduino V4.2
Base Shield V2
Arduino Software 1.8.0
von Matthias Busse
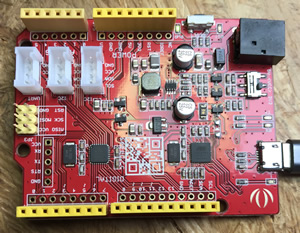
Mein Seeeduino V4.2 ist angekommen.

Er hat ein paar Besonderheiten gegenüber dem Standard Arduino Uno.
1. Er hat einen Micro USB Anschluß
2. Die Logik Spannung lässt sich per Schalter auf 5V oder 3,3V umschalten – ein prima Feature das ich schon oft hätte brauchen können. Bislang musste ich dann Spannungswandler zwischen schalten
3. Er hat 3 Grove Anschlußstecker und lässt sich damit sehr einfach mit verschiedenen Grove Sensoren verbinden. Dazu später mehr.
Und trotzdem passen alle Arduino Uno Shields drauf. Durch die Umschaltung auf 3,3V sogar die speziellen ohne Spannungsumwandlung. Zugegeben davon gibt es nur wenige, aber einen hatte ich schon mal. Und bei vielen hatte ich ein ungutes Gefühl, die waren mit 3,3V Datenspannung angegeben und bis 5V „tolerant“, aber was passiert wenn doch ein wenig mehr raus kommt? Weiterlesen
Der Arduino kann als Frequenzteiler verwendet werden. Mich hat dabei interessiert bis zu welcher Frequenz das möglich ist.
Der Eingang : Dazu muß an einem Eingang das Signal als TTL Pegel anliegen (0/5V beim UNO, NANO, MEGA oder 0/3V beim DUE…) Ich habe hier den Eingang Pin 7 verwendet.
Das Programm: Der Arduino erkennt mit pulsIn(inPin, HIGH) eine steigende Flanke des Eingangssignals.
Der Ausgang: Als schnellen Ausgang habe ich den PORT B genommen und mit dem Assembler Befehl PORTB^=B11111111 umgeschaltet. Weiterlesen
Mit serialEvent() können Zeichen von RX oder der USB Schnittstelle in den Arduino eingelesen werden. serialEvent() wird außerhalb von loop() ausgeführt und liest hier den Seriellen Buffer mit standardmäßig bis zu 64 Zeichen aus.
Das Programm basiert auf der Erklärung hier.
Sollten 64 Zeichen nicht reichen kann man den Buffer vergrößern, siehe hier.
Die Zeichen werden in einem String abgelegt. Das Zeilenende wird mit \n erkannt und dann wird stringComplete auf true gesetzt.
Im Hauptprogramm wird bei stringComplete==true der String ausgegeben. Zusätzlich wird der String in Integer und Float umgewandelt und ausgegeben.
Hier das Programm
// Seriell auf RX ( oder USB ) reinkommende Daten per event auslesen und das Zeilenende erkennen
// serialEvent() ist nicht kompatible mit Arduino Esplora, Leonardo oder Micro
//
// Matthias Busse 17.12.2018 Version 1.0
String inputString=""; // Eingabe String Daten
bool stringComplete=false; // String abgeschlossen
void setup() {
Serial.begin(38400); // Baud
inputString.reserve(64); // 64 Byte Platz für den Seriellen Text
Serial.println("Bitte Text eingeben und mit Enter bestaetigen:");
}
void loop() {
if(stringComplete) {
stringComplete=false;
Serial.print("String : "); // String ausgeben
Serial.println(inputString);
Serial.print("Integer: "); // Integer ausgeben
Serial.println(inputString.toInt());
Serial.print("Float : "); // Float ausgeben
Serial.println(inputString.toFloat());
inputString="";
}
}
void serialEvent() {
// Wird aufgerufen wenn an RX Daten angekommen sind, ausserhalb von loop().
// Ein delay() in loop() kann die Datenübernahme verzögern.
// Der Arduino RX Buffer ist standardmässig 64 Zeichen groß, kann aber ggf. vergrößert werden.
while(Serial.available()) { // bis alle Zeichen im RX Buffer ausgelesen sind
char inChar=(char)Serial.read(); // ein Zeichen im RX Buffer auslesen
if(inChar == '\n') { // String Ende erkennen
stringComplete=true;
}
else { // Zeichen anhängen
inputString+=inChar;
}
}
}
Verwendet wurden :
Arduino Uno
Arduino Programm Version 1.8.0
von Matthias Busse
Für die Vektorrechnung habe ich die Funktionen in einem Unterprogramm vektor.c zusammengefasst.
// Funktionen für die Vektor Rechnung
//
// Matthias Busse 1.10.2018 Version 1.0
// Inhalt:
// vAdd(v1, v2, v3) : v1+v2=v3
// vSub(v1, v2, v3) : v1-v2=v3
// vMultF(v1, f, v2) : v1*f=v2
// f=vBetrag(v1) : |v1|=f
// f=vSkalarprodukt(v1, v2) : v1 * v2=f
// f=vWinkelGrad(v1, v2) : Winkel zwischen v1 und v2 in Grad
// vVektorprodukt(v1, v2, v3) : v1 x v2 = v3
// vEinheitsvektor(v1, v2) : v1 / |v1| = v2, Länge=1
// vRichtungscosinusX(v1) : v1 Winkel zur X-Achse in Grad
// vRichtungscosinusY(v1) : v1 Winkel zur Y-Achse in Grad
// vRichtungscosinusZ(v1) : v1 Winkel zur Z-Achse in Grad
// z |
// |
// |
// ---------- y
// /
// x /
void vAdd(float v1[3], float v2[3], float v3[3]) {
// Vektoren Addieren v1+v2=v3
// Matthias Busse Version 1.0 vom 30.9.2018
v3[0]=v1[0]+v2[0];
v3[1]=v1[1]+v2[1];
v3[2]=v1[2]+v2[2];
}
void vSub(float v1[3], float v2[3], float v3[3]) {
// Vektoren Subtrahieren v1-v2=v3
// Matthias Busse Version 1.0 vom 30.9.2018
v3[0]=v1[0]-v2[0];
v3[1]=v1[1]-v2[1];
v3[2]=v1[2]-v2[2];
}
void vMultF(float v1[3], float z, float v2[3]) {
// Vektor multiplizieren mit Zahl v1*z=v2
// Matthias Busse Version 1.0 vom 30.9.2018
v2[0]=v1[0]*z;
v2[1]=v1[1]*z;
v2[2]=v1[2]*z;
}
float vBetrag(float v1[3]) {
// Vektor Betrag (Länge) von v1 oder |v1|=z
// Matthias Busse Version 1.0 vom 30.9.2018
float z;
z=sqrt(v1[0]*v1[0] + v1[1]*v1[1] + v1[2]*v1[2]);
return z;
}
float vSkalarprodukt(float v1[], float v2[]) {
// Vektoren Skalar multiplizieren v1 * v2 = z
// |V1| * |V2| * cos winkel_dawischen = z
// Wenn das Ergebis 0 ist, dann sind die Vektoren senkrecht zueinander
// Matthias Busse Version 1.0 vom 30.9.2018
float z;
z= (v1[0]*v2[0]) + (v1[1]*v2[1]) + (v1[2]*v2[2]);
return z;
}
float vWinkelGrad(float v1[], float v2[]) {
// Den Winkel in Grad zwischen zwei Vektoren berechnen
// Matthias Busse Version 1.0 vom 30.9.2018
float z, w;
z=vSkalarprodukt(v1, v2);
w = z / vBetrag(v1) / vBetrag(v2);
return acos(w)*57.296; // Rad zu Grad
}
void vVektorprodukt(float v1[3], float v2[3], float v3[3]) {
// Vektorprodukt v1 x v2 = v3
// v3 steht senkrecht auf v1 und v2
// v3 Betrag |v3| ist die Fläche vom v1 und v2 Parallelogramm
// Winkel zwischen v1 und v2 ist
// |v1 x v2| = |v3| = |A| * |B| * sin winkel_dawischen
// Matthias Busse Version 1.0 vom 30.9.2018
v3[0]= (v1[1]*v2[2]) - (v1[2]*v2[1]);
v3[2]= (v1[0]*v2[1]) - (v1[1]*v2[0]);
v3[1]= -1.0 * ((v1[0]*v2[2]) - (v1[2]*v2[0]));
}
void vEinheitsvektor(float v1[3], float v2[3]) {
// Einheitsvektor v1 / |v1| = v2
// Ergibt den Vektor mit der Länge 1
// Matthias Busse Version 0.1 vom 01.10.2018
float betrag;
betrag=vBetrag(v1);
v2[0]=v1[0]/betrag;
v2[1]=v1[1]/betrag;
v2[2]=v1[2]/betrag;
}
float vRichtungscosinusX(float v1[3]) {
// Der RichtungskosinusX bildet den Winkel zwischen dem Vektor und der X Achse
// cos(w) = vx / |v|
// Matthias Busse Version 1.0 vom 01.10.2018
float winkel;
winkel=acos(v1[0]/vBetrag(v1));
return winkel*57.296; // Rad zu Grad
}
float vRichtungscosinusY(float v1[3]) {
// Der RichtungskosinusY bildet den Winkel zwischen dem Vektor und der Y Achse
// cos(w) = vy / |v|
// Matthias Busse Version 1.0 vom 01.10.2018
float winkel;
winkel=acos(v1[1]/vBetrag(v1));
return winkel*57.296; // Rad zu Grad
}
float vRichtungscosinusZ(float v1[3]) {
// Der RichtungskosinusZ bildet den Winkel zwischen dem Vektor und der Z Achse
// cos(w) = vz / |v|
// Matthias Busse Version 1.0 vom 01.10.2018
float winkel;
winkel=acos(v1[2]/vBetrag(v1));
return winkel*57.296; // Rad zu Grad
}
Hier das Programm um die Vektor Funktionen zu testen.
Weiterlesen