
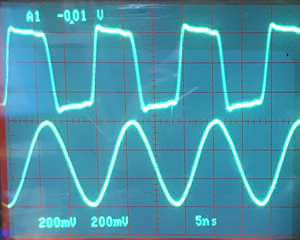
Der ADF4351 liefert im kleinsten Bereich Frequenzen von 33 MHz bis 69 MHz aus seinem eingebauten Teiler mit ca. 1mW als Rechtecksignal. Ich möchte die Oberwellen weg bekommen und habe dazu einen Tiefpaß aufgebaut mit einer Grenzfrequenz von 69 MHz.
Das Rechtecksignal hat die ungeraden Vielfachen enthalten, also die 3-fach, die 5-fache usw. Frequenz mit 1/3 Amplitude, 1/5 Amplitude usw.
Das heißt für meinen Tiefpaß, ich möchte bei der tiefsten einstellbaren Frequenz von 33 MHz schon die 3-fache Frequenz, also 99 MHz unterdrücken und auch die 5-fache Frequenz, also 165 MHz. Der Tiefpaß soll aber meine höchste gewünschte Frequenz von 69MHz noch passieren lassen.
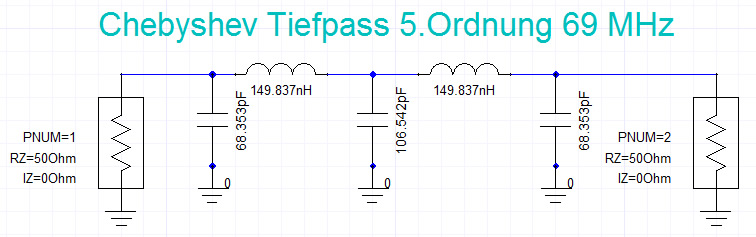
Dafür habe ich einen Chebychev Tiefpaß 5. Ordnung berechnet, es sind also 5 Blindelemente enthalten. Ich habe dafür den Aufbau mit 3 Kondensatoren und 2 Induktivitäten gewählt. Die Schaltung wurde mit dem Ansoft Designer SV durchgerechnet.
Hier der Simulationsaufbau:
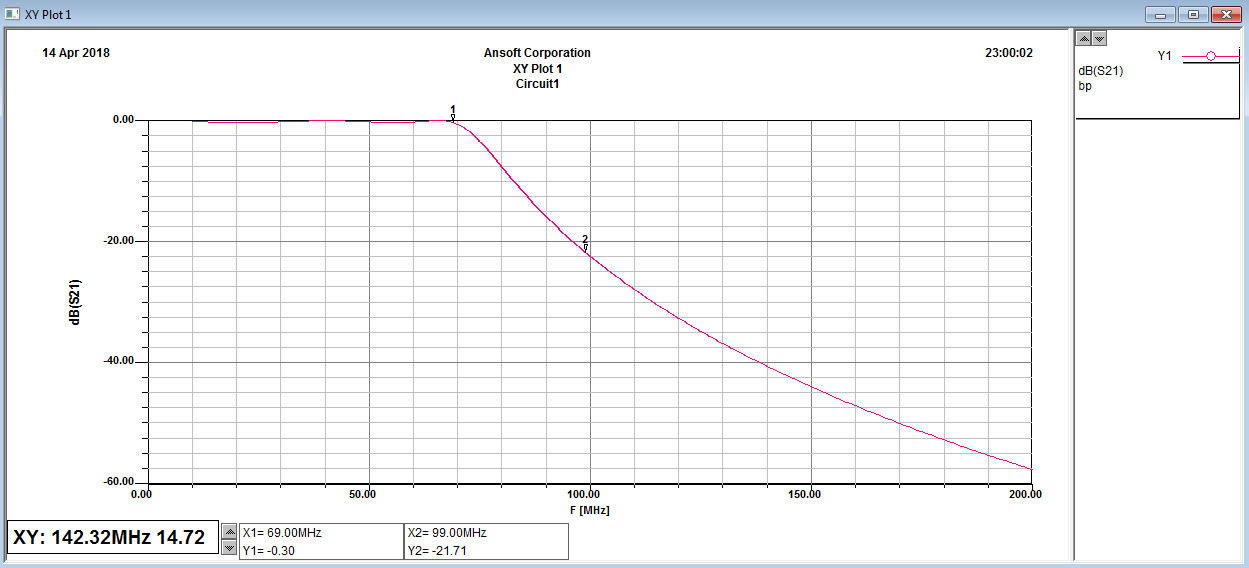
Und das Ergebnis mit S21 ist:
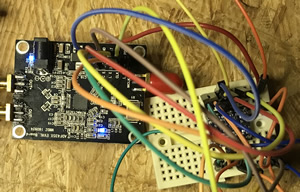
Bei der Auswahl der Bauelemente sind glücklicherweise fast Normgrößen aus der E12 Reihe raus gekommen, sodaß ich den Tiefpaß sofort auf einer Streifenraster Platine mit SMD Bauteilen aufbauen konnte. Weiterlesen


 dazwischen schalten um den Wellenwiderstand zu transformieren.
dazwischen schalten um den Wellenwiderstand zu transformieren.  = sin(\omega t) + 1/3 sin(3 \omega t) + 1/5 sin(5 \omega t) + 1/7 sin(7 \omega t) ...")