
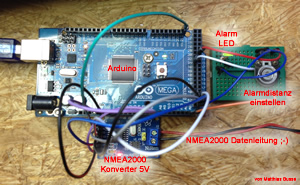
Ein Ankeralarm hält die Ankerposition des Bootes fest und ermittelt dann kontinuierlich den Abstand zum Ankerplatz über die Nacht. Es wird ein Alarmradius eingegeben den das Boot nicht verlassen darf. Alle gehen schlafen und sollen geweckt werden, wenn der Anker nicht hält, weil z.B. der Wind stärker geworden ist, der Anker sich gelöst hat und der eingestellte maximale Ankerradius verlassen wird.
Dazu benötige ich einen GPS Empfänger (hier mein Lowrance HDS), ein NMEA2000 Netzwerk, den Arduino mit Schnittstellenplatine zur Berechnung der Positionen und dem Abstand, einen Poti um die Alarmdistanz (maximaler Ankerradius) einstellen zu können und einen Alarmtongeber (hier habe ich nur eine LED angeschlossen) der ggf. noch über ein Relais geschaltet werden kann. Weiterlesen
 = sin(\omega t) + 1/3 sin(3 \omega t) + 1/5 sin(5 \omega t) + 1/7 sin(7 \omega t) ...")



 30ppm (parts per million) also
30ppm (parts per million) also  .
.